【47】图像金字塔详解:从尺度变换到多分辨率特征提取python实现
本文从OpenCV的基础图像尺度变换入手,深入讲解图像金字塔的核心概念(高斯金字塔、拉普拉斯金字塔、DOG差分金字塔)、实现逻辑及典型应用。结合Python代码示例,帮你快速掌握多分辨率图像处理的关键技巧——无论是图像缩放、细节还原还是特征检测(如SIFT),图像金字塔都是不可绕过的基础工具。拉普拉斯金字塔第i层L_iLiGi−cv2.pyrUpGi1∗g5x5LiGi−cv2.pyrUpGi
文章简介
本文从OpenCV的基础图像尺度变换入手,深入讲解图像金字塔的核心概念(高斯金字塔、拉普拉斯金字塔、DOG差分金字塔)、实现逻辑及典型应用。结合Python代码示例,帮你快速掌握多分辨率图像处理的关键技巧——无论是图像缩放、细节还原还是特征检测(如SIFT),图像金字塔都是不可绕过的基础工具。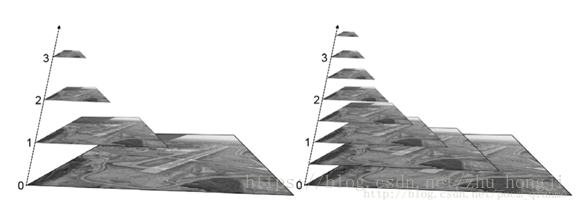
一、图像尺度变换:从resize函数说起
图像尺度变换是调整图像尺寸的基础操作,OpenCV中通过cv2.resize函数实现。它能将源图像精准缩放到指定尺寸,核心是插值算法的选择:
- 缩小图像:推荐用
cv2.INTER_AREA(区域插值),能有效保留图像结构; - 放大图像:推荐用
cv2.INTER_LINEAR(双线性插值),结果更平滑自然。
API说明
cv2.resize(src, dsize, fx=None, fy=None, interpolation=cv2.INTER_LINEAR)
src:输入图像;dsize:目标尺寸(如(width, height));fx/fy:宽/高的缩放因子(若指定则dsize无效);interpolation:插值方式(默认双线性)。
示例:将图像缩小为原尺寸的1/2:
import cv2
src = cv2.imread("girl1.jpg")
dst = cv2.resize(src, None, fx=0.5, fy=0.5, interpolation=cv2.INTER_AREA)
二、图像金字塔:多分辨率的“金字塔结构”
图像金字塔是多分辨率图像的集合,以“金字塔”形状排列——底部是高分辨率原始图像,越往上图像尺寸越小、分辨率越低。它的核心价值在于:用不同分辨率的图像表达同一内容,适配不同场景(如快速分割、精细特征提取)。
常见的图像金字塔有三类:高斯金字塔(向下/向上采样)、拉普拉斯金字塔(残差保存)、DOG差分金字塔(特征提取)。整个拉普拉斯金字塔运算过程可以通过下图来概括: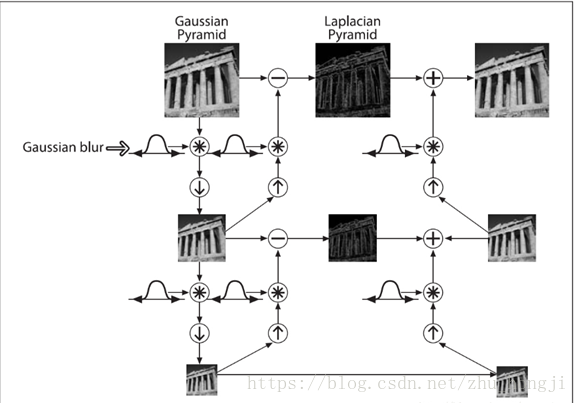
2.1 高斯金字塔:从高分辨率到低分辨率
高斯金字塔是图像金字塔的基础,用于向下采样(缩小图像)和向上采样(放大图像),核心操作是高斯模糊+行列抽样。
(1)向下采样( PyrDown ):缩小图像
从第i层G_i生成第i+1层G_{i+1}的步骤:
- 用5×5高斯内核(
g_{5x5})对G_i进行模糊; - 删除
G_i的所有偶数行和偶数列。
最终G_{i+1}的尺寸是G_i的1/2(面积1/4),但会丢失细节——因为模糊和抽样都会删除信息。
OpenCV中用cv2.pyrDown实现:
# 将src缩小为原尺寸的1/2
dst = cv2.pyrDown(src)
(2)向上采样( PyrUp ):放大图像
从第i+1层G_{i+1}恢复第i层G_i的步骤:
- 将
G_{i+1}的尺寸放大两倍(每个维度×2),新增的行/列用0填充; - 用原高斯内核(
g_{5x5}×4)对放大后的图像卷积,估计“丢失的像素”。
注意:向上采样无法完全恢复原始图像——因为向下采样时丢失的细节无法通过模糊找回,结果会比原图像模糊。
OpenCV中用cv2.pyrUp实现:
# 将src放大为原尺寸的2倍
dst = cv2.pyrUp(src)
关键结论
pyrUp和pyrDown不是互逆操作:对图像先pyrDown再pyrUp,得到的图像会比原图模糊(丢失了细节)。
2.2 拉普拉斯金字塔:保存“丢失的细节”
拉普拉斯金字塔是高斯金字塔的“逆操作”,用于保存向下采样时丢失的信息(残差),以便后续还原高分辨率图像。
数学定义
拉普拉斯金字塔第i层L_i的公式为:Li=Gi−cv2.pyrUp(Gi+1)∗g5x5 L_i = G_i - \text{cv2.pyrUp}(G_{i+1}) * g_{5x5} Li=Gi−cv2.pyrUp(Gi+1)∗g5x5其中:
G_i是高斯金字塔第i层(未下采样的原图);cv2.pyrUp(G_{i+1})是对下采样后的G_{i+1}进行向上采样的结果;g_{5x5}是5×5高斯内核(用于模拟向上采样的模糊操作)。
通俗理解
拉普拉斯金字塔的每一层,都是**“原图”减去“先缩小再放大的图”**——差值就是下采样时丢失的细节(残差)。例如:
# 生成高斯金字塔第1层(G1 = pyrDown(G0))
G1 = cv2.pyrDown(src)
# 向上采样得到G1_up = pyrUp(G1)
G1_up = cv2.pyrUp(G1)
# 拉普拉斯第0层:L0 = G0 - G1_up
L0 = cv2.subtract(src, G1_up)
作用
拉普拉斯金字塔的残差图,能帮我们还原高分辨率图像——比如用G_{i+1}和L_i可以恢复G_i:Gi=Li+cv2.pyrUp(Gi+1) G_i = L_i + \text{cv2.pyrUp}(G_{i+1}) Gi=Li+cv2.pyrUp(Gi+1)
2.3 DOG差分金字塔:特征提取的“利器”
DOG(Difference of Gaussian,高斯差分)金字塔是高斯金字塔的衍生品,用于提取图像的内在特征(如边缘、角点),是SIFT特征检测的核心步骤。
定义
DOG金字塔的第i组第j层DOG_{i,j},是同一组内相邻两层高斯图像的差值:DOGi,j=Gi,j+1−Gi,j DOG_{i,j} = G_{i,j+1} - G_{i,j} DOGi,j=Gi,j+1−Gi,j其中:
G_{i,j}是高斯金字塔第i组第j层的图像;G_{i,j+1}是同一组、下一个尺度的高斯模糊图像(模糊程度更高)。
通俗理解
对同一张图像做两次不同程度的高斯模糊,再相减——结果就是DOG图像。它能突出图像中的灰度变化剧烈区域(如边缘、角点),过滤掉平缓区域。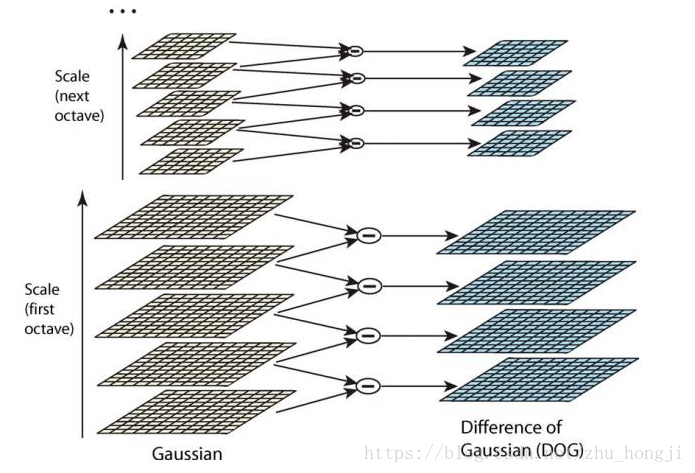
OpenCV实现
# 将图像转灰度
gray = cv2.cvtColor(src, cv2.COLOR_BGR2GRAY)
# 两次高斯模糊(不同尺度)
g1 = cv2.GaussianBlur(gray, (3,3), 0)
g2 = cv2.GaussianBlur(g1, (3,3), 0)
# 计算DOG图像(归一化以便显示)
dog = cv2.subtract(g1, g2)
dog_normalized = cv2.normalize(dog, None, 0, 255, cv2.NORM_MINMAX)
应用
DOG金字塔是SIFT算法的基础——通过寻找DOG图像中的极值点(局部最大/最小值),可以定位图像的关键特征点。
三、代码实战:完整流程演示
以下是整合了尺度变换、高斯金字塔、DOG金字塔的Python代码,附结果分析:
import cv2
import matplotlib.pyplot as plt
# 1. 读取图像
src = cv2.imread("girl1.jpg")
src_rgb = cv2.cvtColor(src, cv2.COLOR_BGR2RGB) # 转RGB用于matplotlib显示
# 2. 尺度变换(缩小为原尺寸的1/2)
resize_dst = cv2.resize(src, None, fx=0.5, fy=0.5, interpolation=cv2.INTER_AREA)
resize_rgb = cv2.cvtColor(resize_dst, cv2.COLOR_BGR2RGB)
# 3. 高斯金字塔:向下采样(PyrDown)
pyrdown_dst = cv2.pyrDown(src)
pyrdown_rgb = cv2.cvtColor(pyrdown_dst, cv2.COLOR_BGR2RGB)
# 4. 高斯金字塔:向上采样(PyrUp)
pyrup_dst = cv2.pyrUp(pyrdown_dst)
pyrup_rgb = cv2.cvtColor(pyrup_dst, cv2.COLOR_BGR2RGB)
# 5. DOG差分金字塔
gray = cv2.cvtColor(src, cv2.COLOR_BGR2GRAY)
g1 = cv2.GaussianBlur(gray, (3,3), 0)
g2 = cv2.GaussianBlur(g1, (3,3), 0)
dog = cv2.subtract(g1, g2)
dog_normalized = cv2.normalize(dog, None, 0, 255, cv2.NORM_MINMAX)
# 显示结果
plt.figure(figsize=(12, 8))
plt.subplot(231), plt.imshow(src_rgb), plt.title("Original")
plt.subplot(232), plt.imshow(resize_rgb), plt.title("Resize (1/2)")
plt.subplot(233), plt.imshow(pyrdown_rgb), plt.title("PyrDown (1/2)")
plt.subplot(234), plt.imshow(pyrup_rgb), plt.title("PyrUp (from PyrDown)")
plt.subplot(235), plt.imshow(dog, cmap="gray"), plt.title("DOG (Raw)")
plt.subplot(236), plt.imshow(dog_normalized, cmap="gray"), plt.title("DOG (Normalized)")
plt.tight_layout()
plt.show()
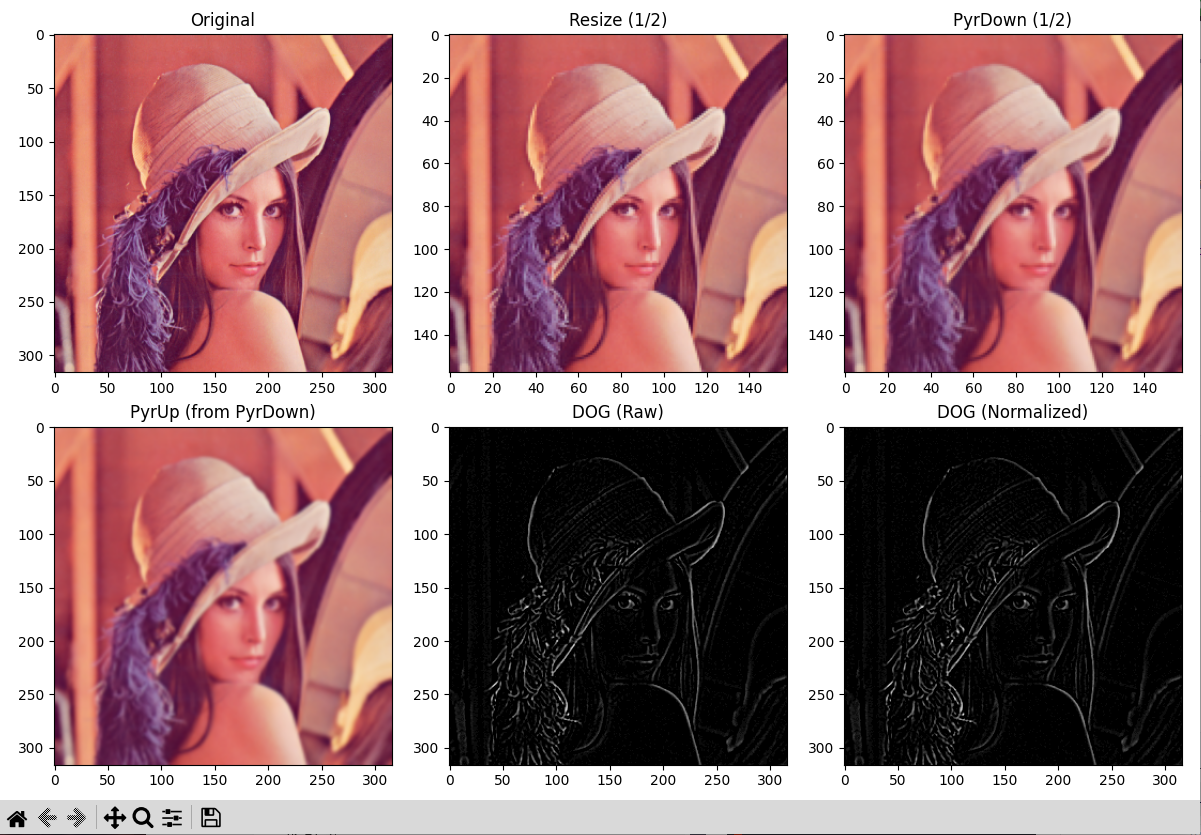
结果分析
- Resize vs PyrDown:两者都能缩小图像,但PyrDown会先模糊再抽样,丢失更多细节(更“柔和”);
- PyrUp的模糊性:对PyrDown后的图像进行PyrUp,结果比原图模糊——因为向下采样时丢失了信息;
- DOG的特征突出:归一化后的DOG图像清晰显示了图像的边缘和纹理(如头发、衣物的轮廓),这正是SIFT特征提取的基础。
四、图像金字塔的典型应用
- 图像分割:先在金字塔高层(低分辨率)快速完成初始分割(计算量小),再逐层向下优化(恢复细节);
- 特征检测:DOG金字塔是SIFT算法的核心——通过寻找DOG图像的极值点,定位图像的“关键特征”(如物体的角点、边缘);
- 图像融合:用拉普拉斯金字塔融合不同分辨率的图像(如将高分辨率细节融合到低分辨率背景中)。
获取更多资料
我给大家整理了一套全网最全的人工智能学习资料(1.5T),包括:机器学习,深度学习,大模型,CV方向,NLP方向,kaggle大赛,实战项目、自动驾驶,AI就业等免费获取。

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 44
44 0
0- 0



 已为社区贡献29条内容
已为社区贡献29条内容

所有评论(0)