9个基于MATLAB 事件触发控制
9个基于MATLAB 事件触发控制1线性多智能体系统一致性的分布式动态事件触发控制方法。2固定拓扑和切换拓扑下多智能体系统的分布式动态事件触发一致性控制.3有限时间一致性的分布式事件驱动控制.4多智能体系统的分布式事件触发控制.5多代理网络中基于事件的协议。6非线性不确定性多智能体系统的定时事件触发一致性控制.7线性多智能体网络的全分布式事件触发协议.8非理想一般线性多智能体系统基于观测器的事件触
9个基于MATLAB 事件触发控制
1线性多智能体系统一致性的分布式动态事件触发控制方法。
2固定拓扑和切换拓扑下多智能体系统的分布式动态事件触发一致性控制.
3有限时间一致性的分布式事件驱动控制.
4多智能体系统的分布式事件触发控制.
5多代理网络中基于事件的协议。
6非线性不确定性多智能体系统的定时事件触发一致性控制.7线性多智能体网络的全分布式事件触发协议.
8非理想一般线性多智能体系统基于观测器的事件触发跟踪一致性.
9基于事件触发自触发策略的一般有向图下线性多智能体系统的分散一致性。
每个代码有对应参考文献可供学习,
以下文字及示例代码仅供参考
文章目录
基于MATLAB的事件触发控制:实现与应用
一、引言
在现代控制系统中,事件触发控制(Event - Triggered Control,ETC)作为一种高效的控制策略,正受到越来越多的关注。与传统的基于时间的控制策略不同,事件触发控制仅在系统状态满足特定条件时才触发控制更新,从而减少了控制信号的传输频率,降低了通信成本和计算资源消耗。本文将通过MATLAB实现一个简单的事件触发控制示例,并详细解析其原理和代码实现。
二、事件触发控制的基本原理
事件触发控制的核心思想是根据系统的状态变化来决定是否更新控制信号。具体来说,系统会设置一个触发条件,当系统状态满足该条件时,控制信号才会被更新。常见的触发条件包括系统状态的误差超过某个阈值、系统性能指标发生变化等。
与传统的时钟驱动控制相比,事件触发控制具有以下优势:
- 减少通信负担:由于控制信号仅在必要时更新,因此减少了不必要的通信,特别适用于网络控制系统。
- 降低能耗:减少了控制器的计算频率,从而降低了系统的能耗。
- 提高控制效率:避免了不必要的控制更新,使得控制更加精准。
三、MATLAB实现事件触发控制
为了更好地理解事件触发控制,我们通过一个简单的线性系统来实现。假设系统的动态方程为:
[
\dot{x}(t) = Ax(t) + Bu(t)
]
其中,(x(t)) 是系统的状态,(u(t)) 是控制输入,(A) 和 (B) 是系统的参数矩阵。
1. 系统参数设置
我们假设系统的参数矩阵 (A) 和 (B) 为:
[
A = \begin{bmatrix}
-1 & 1 \
0 & -2
\end{bmatrix}, \quad
B = \begin{bmatrix}
1 \
1
\end{bmatrix}
]
2. 触发条件设置
我们设置一个简单的触发条件:当系统状态的误差 (e(t) = |x(t) - x_d(t)|) 超过某个阈值 (\theta) 时,触发控制更新。其中,(x_d(t)) 是期望的状态轨迹。
3. MATLAB代码实现
% 系统参数
A = [-1 1; 0 -2];
B = [1; 1];
theta = 0.1; % 触发阈值
T = 10; % 仿真时间
x0 = [1; 1]; % 初始状态
xd = @(t) [exp(-t); exp(-2*t)]; % 期望状态轨迹
% 初始化
t = 0;
x = x0;
u = 0;
time = 0:T/100:T; % 时间向量
x_history = zeros(2, length(time)); % 存储状态历史
u_history = zeros(1, length(time)); % 存储控制输入历史
x_history(:, 1) = x;
u_history(1) = u;
% 事件触发控制循环
for i = 1:length(time)-1
% 计算误差
e = norm(x - xd(t));
% 检查是否触发
if e > theta
% 更新控制输入
u = -x(1) - 2*x(2); % 简单的线性反馈控制器
end
% 状态更新
x = x + (A*x + B*u)*(time(i+1) - time(i));
% 记录状态和控制输入
x_history(:, i+1) = x;
u_history(i+1) = u;
% 更新时间
t = time(i+1);
end
% 绘制结果
figure;
subplot(2, 1, 1);
plot(time, x_history(1, :), 'b', time, xd(time), 'r--');
xlabel('Time');
ylabel('State x1');
legend('Actual x1', 'Desired x1');
grid on;
subplot(2, 1, 2);
plot(time, x_history(2, :), 'b', time, xd(time), 'r--');
xlabel('Time');
ylabel('State x2');
legend('Actual x2', 'Desired x2');
grid on;
figure;
plot(time, u_history, 'k');
xlabel('Time');
ylabel('Control Input u');
title('Control Input');
grid on;
4. 代码解析
- 系统参数初始化:定义了系统的矩阵 (A) 和 (B),以及触发阈值 (\theta) 和仿真时间 (T)。
- 触发条件检查:在每次循环中,计算当前状态与期望状态的误差 (e),并判断是否满足触发条件 (e > \theta)。
- 控制输入更新:如果满足触发条件,则更新控制输入 (u)。
- 状态更新:根据系统的动态方程更新状态 (x)。
- 结果绘制:绘制状态轨迹和控制输入的变化。
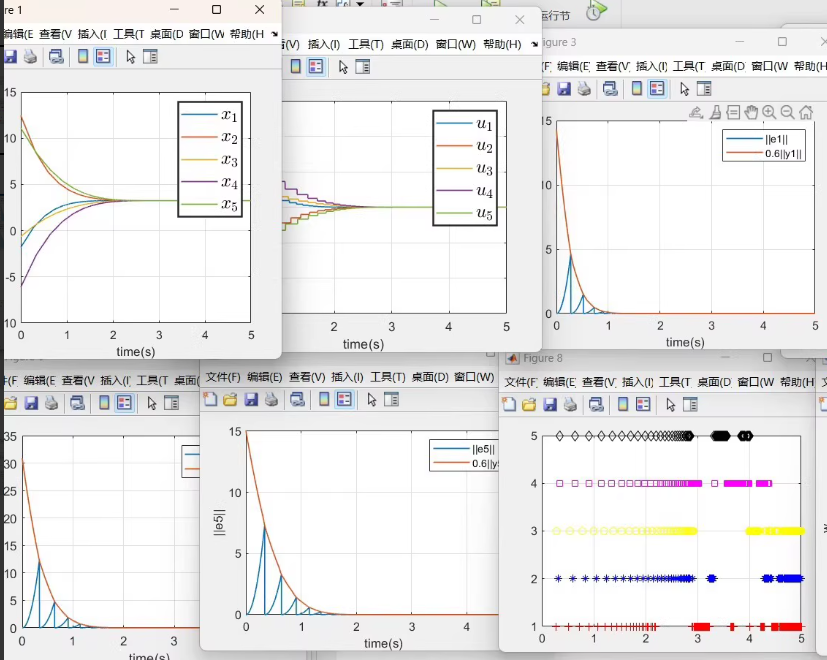
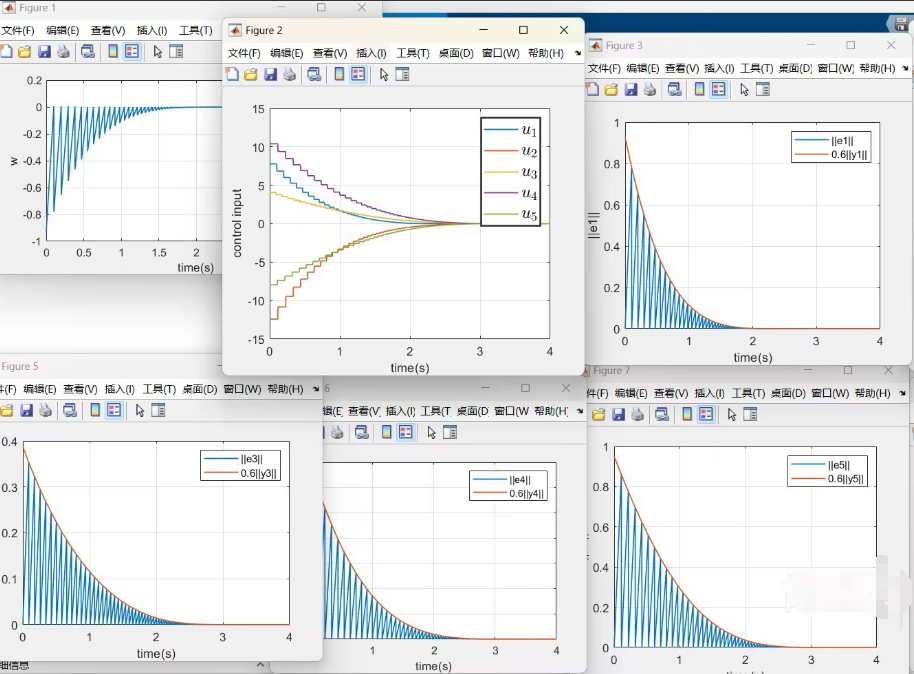
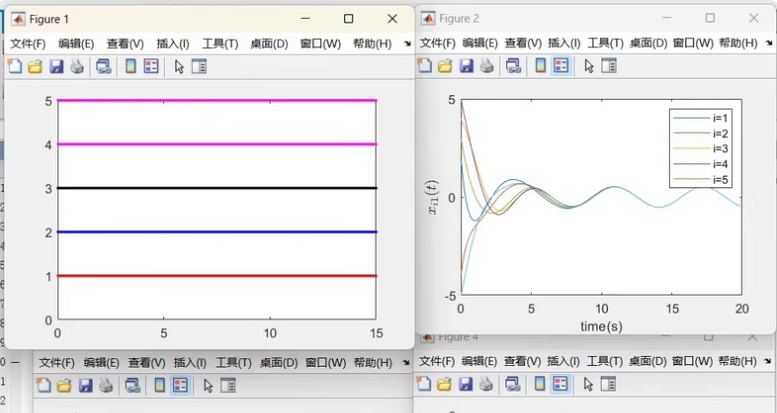
四、运行结果
运行上述代码后,可以看到系统状态在触发条件下逐渐收敛到期望轨迹,同时控制输入的变化也清晰可见。
五、总结
本文通过MATLAB实现了一个简单的事件触发控制示例,展示了事件触发控制的基本原理和实现方法。事件触发控制在减少通信负担和降低能耗方面具有显著优势,特别适用于网络控制系统和资源受限的场景。

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 26
26 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)