c#联合opencvsharp开发的视觉源码程序 包含模板匹配,找线找圆,预处理等功能 全部源...
c#联合opencvsharp开发的视觉源码程序包含模板匹配,找线找圆,预处理等功能全部源码,包含图像显示控件,绘制roi本文深入剖析一套基于 C# 与 OpenCvSharp 构建的工业级机器视觉系统。该系统面向高精度定位、缺陷检测与模板匹配等典型工业应用场景,采用模块化、可配置化的设计理念,支持 Basler 等主流工业相机接入,并具备完整的配方管理、参数序列化、图像处理工具链及结果可视化能力
c#联合opencvsharp开发的视觉源码程序 包含模板匹配,找线找圆,预处理等功能 全部源码,包含图像显示控件,绘制roi
概述
本文深入剖析一套基于 C# 与 OpenCvSharp 构建的工业级机器视觉系统。该系统面向高精度定位、缺陷检测与模板匹配等典型工业应用场景,采用模块化、可配置化的设计理念,支持 Basler 等主流工业相机接入,并具备完整的配方管理、参数序列化、图像处理工具链及结果可视化能力。整体架构清晰,职责分明,适用于自动化产线中的视觉引导、质量检测与过程控制。
系统架构
系统采用典型的分层架构,主要由以下核心模块组成:
- DeviceLib:设备抽象层,封装相机(如 Basler GIGE)与条码读取器的驱动与通信逻辑,提供统一的图像采集接口。
- ParamDataLib:参数数据模型库,定义各类视觉工具(如 Blob 检测、霍夫变换、卡尺测量等)的配置参数与结果结构,支持序列化持久化。
- FuncToolLib:视觉算法工具库,实现具体的图像处理与分析算法,如模板匹配(NCC / Canny)、Blob 分析、直线/圆检测、卡尺边缘查找等。
- VisionShowLib:图像显示与交互组件库,封装图像绘制、ROI 编辑、结果叠加等可视化功能。
- UCLib:通用 UI 控件扩展库,提供定制化控件以提升人机交互体验。
- 主应用层(如 visionForm):集成上述模块,提供用户界面、流程控制、配方加载/保存、相机参数设置及检测任务调度。
各模块通过接口与抽象类(如 IRunTool、Icam)解耦,便于扩展与维护。
核心功能模块解析
1. 设备接入与图像采集(DeviceLib)
系统通过 Icam 接口抽象相机设备,当前实现了对 Basler GIGE 相机的支持(CCD_BaslerGIGE.cs)。其核心能力包括:
- 设备枚举与连接:自动识别网络中的 Basler 相机并建立连接。
- 参数控制:支持动态设置曝光时间、增益等关键成像参数。
- 图像采集模式:提供单帧抓取(OneShot)与连续采集(ContinueGrab)两种模式,并通过事件回调(
ImageGrabbed)将图像数据(Bitmap)传递给上层。 - 稳定性保障:包含连接丢失处理、心跳包设置等工业级可靠性机制。
2. 配方与参数管理
系统引入“配方(Recipe)”概念,用于管理不同产品的检测逻辑与参数。每个配方是一个独立的文件夹,内部按功能组织配置文件,例如:
配方/
└── ProductModel_1/
├── Config/
│ ├── config.ini
│ └── 基准轮廓信息.ini
├── ToolsData
├── ToolsName
└── Ncc匹配.ini- 参数持久化:通过
GeneralUse.WriteSerializationFile和ReadSerializationFile方法,将复杂的参数对象(如NccTemplateMatchData、Blob3Data)序列化为二进制文件,确保配置的完整性与高效读写。 - 动态加载:主应用在切换配方时,会动态加载对应的工具列表、参数和模板图像,实现“一产品一方案”的灵活部署。
3. 视觉算法工具链(FuncToolLib)
这是系统的核心智能所在,提供了丰富的、可插拔的视觉工具。
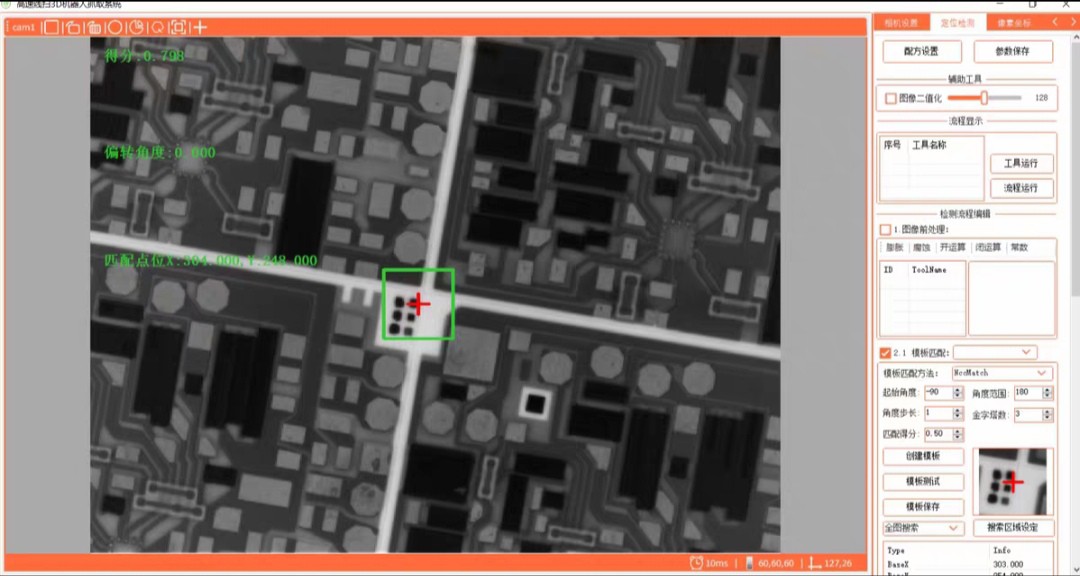
模板匹配
- NCC 模板匹配:基于归一化互相关(Normalized Cross-Correlation),支持多角度、多尺度(图像金字塔)搜索,适用于高精度定位。
- Canny 模板匹配:先对模板和原图进行 Canny 边缘提取,再进行匹配,对光照变化鲁棒性更强。
特征检测
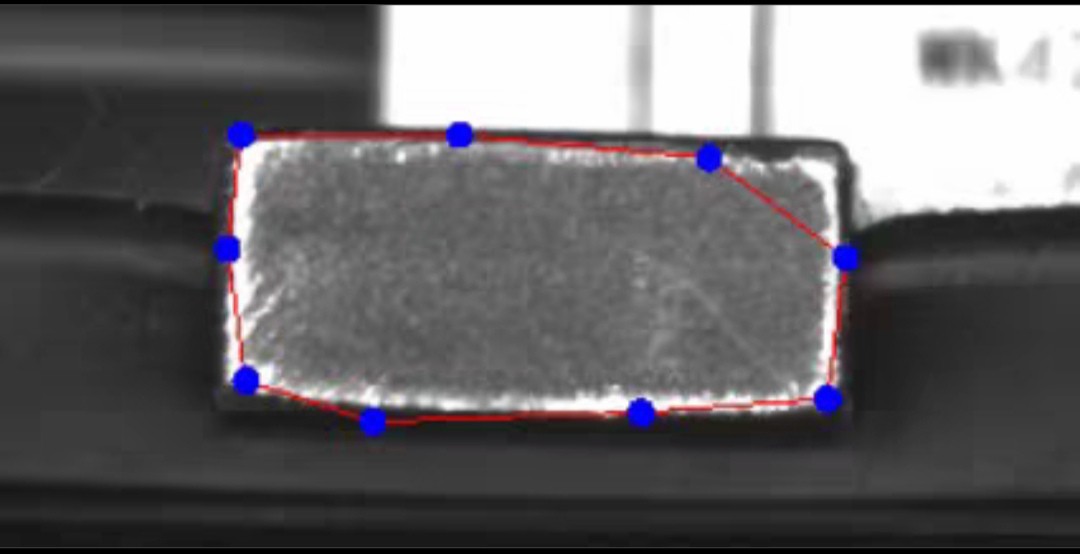
- Blob 分析:提供多版本实现(
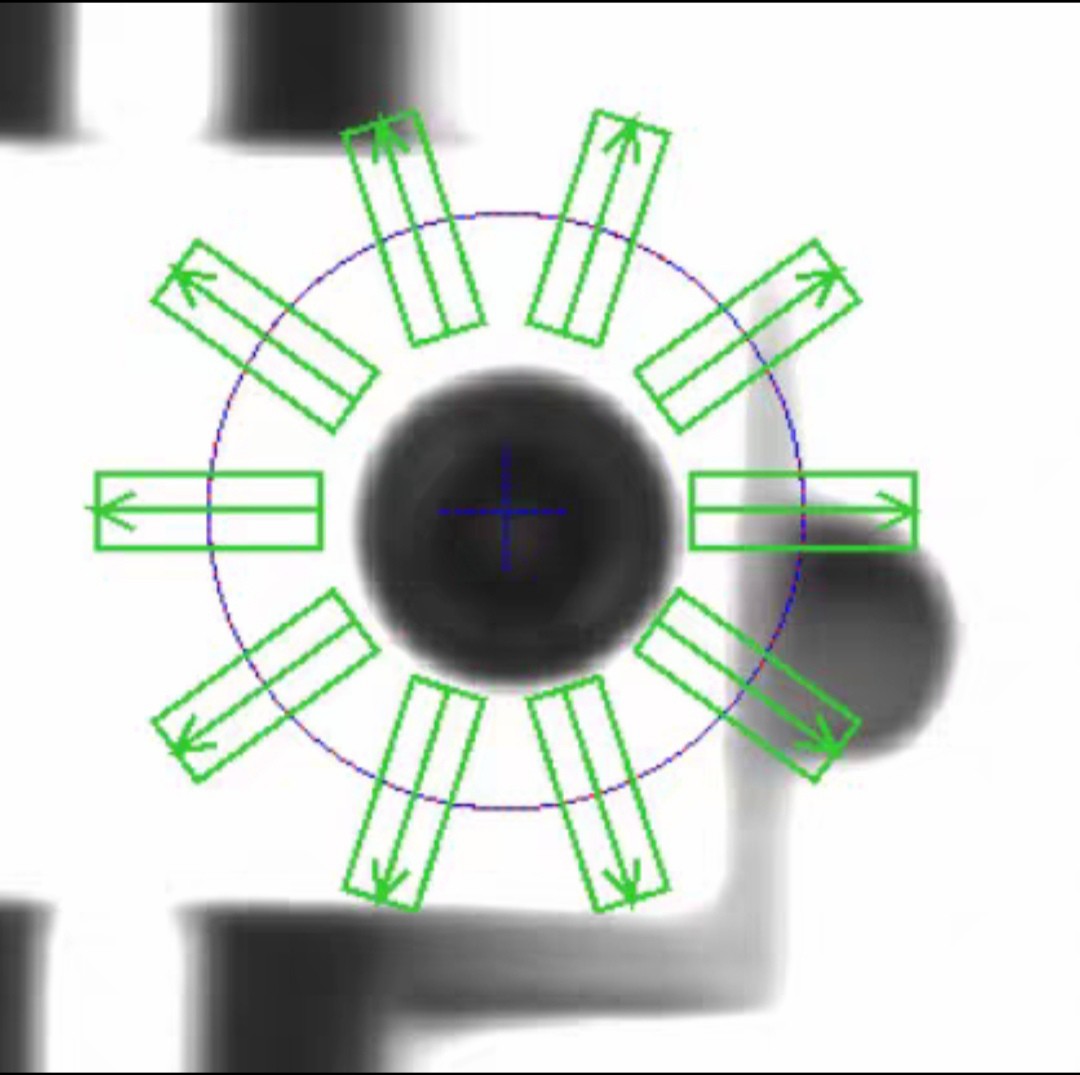
BlobTool,Blob3Tool),支持基于面积、宽高、圆度、凸度等多达十余种形态学特征的粒子筛选,并可输出重心、轮廓、外接矩形等信息。 - 霍夫变换:
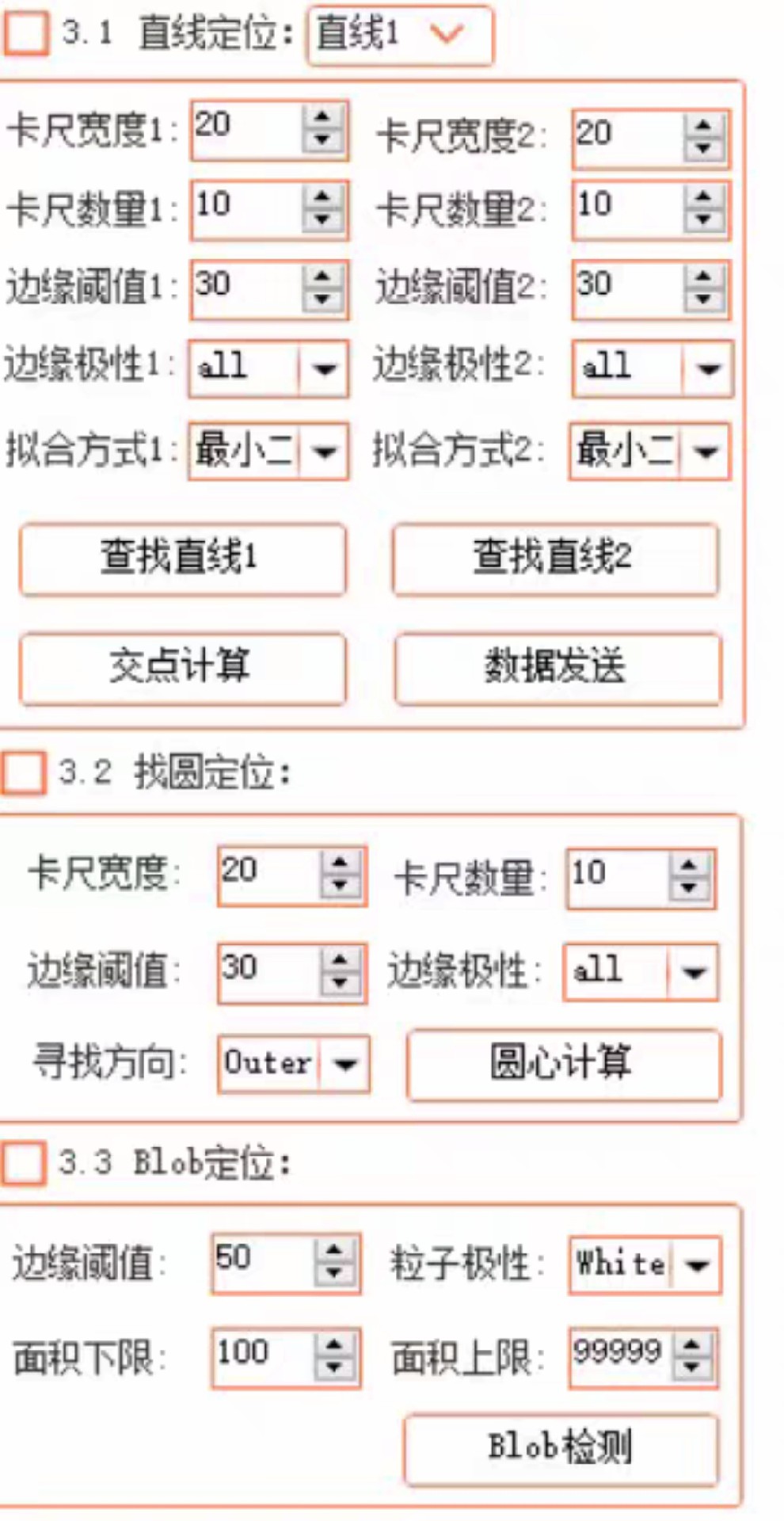
- 直线检测(HoughLinesPTool):结合 Canny 边缘检测与概率霍夫变换,精准提取图像中的线段。
- 圆检测(HoughCircleData):用于定位圆形特征,如通孔、圆柱体等。
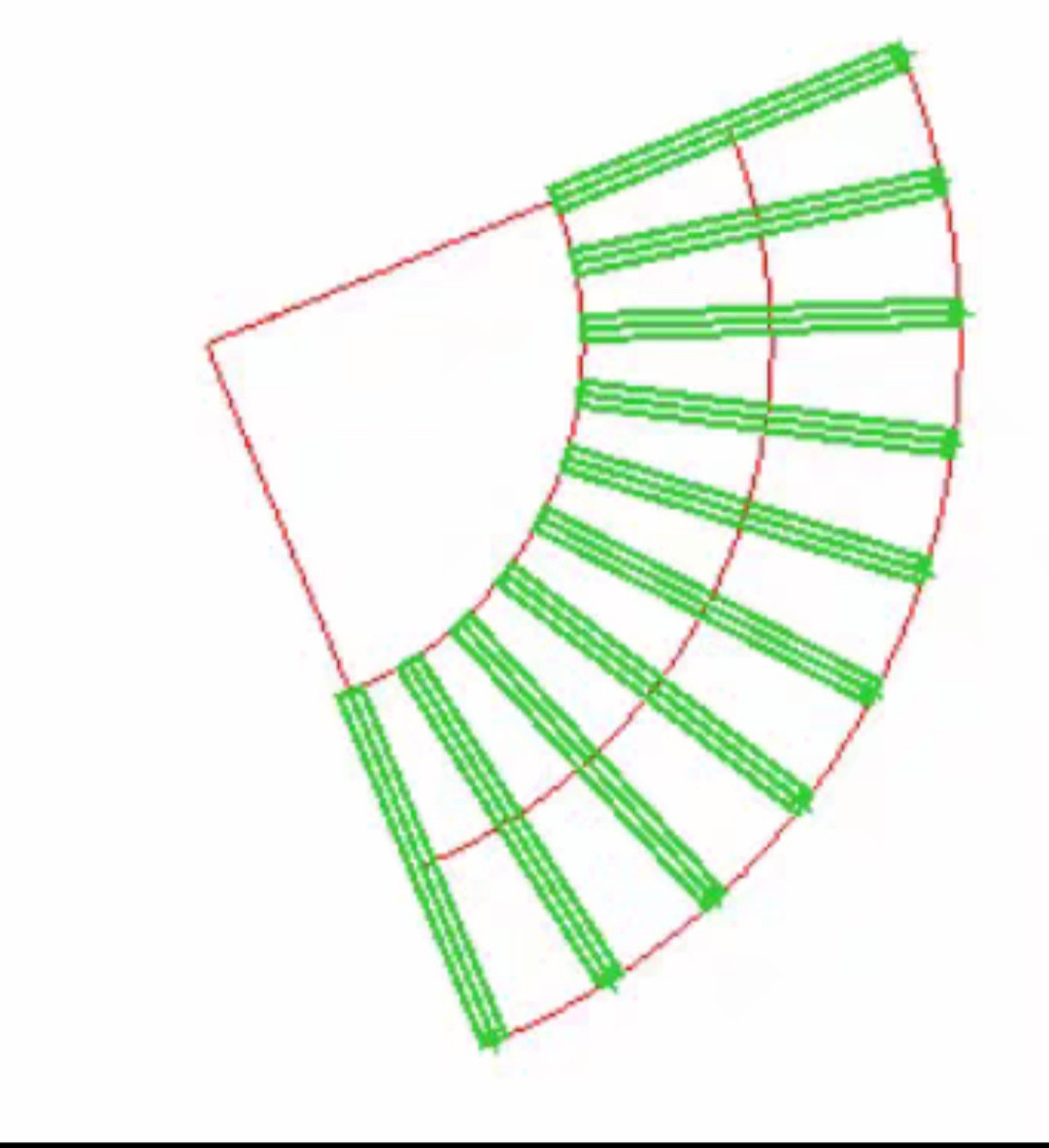
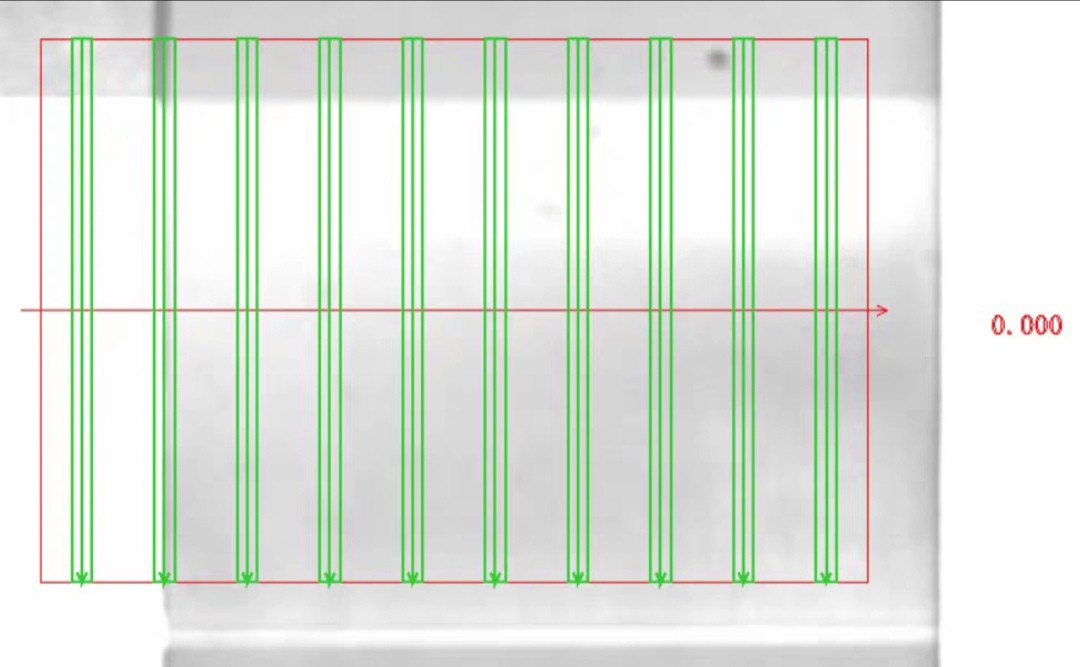
精密测量
- 直线卡尺工具(LinearCaliperTool):在用户定义的旋转矩形区域内,沿垂直或水平方向进行灰度投影,通过 Sobel 算子查找边缘点。支持多卡尺并行测量,并可使用 RANSAC 算法对边缘点进行直线拟合,有效剔除异常点,提高测量稳定性。
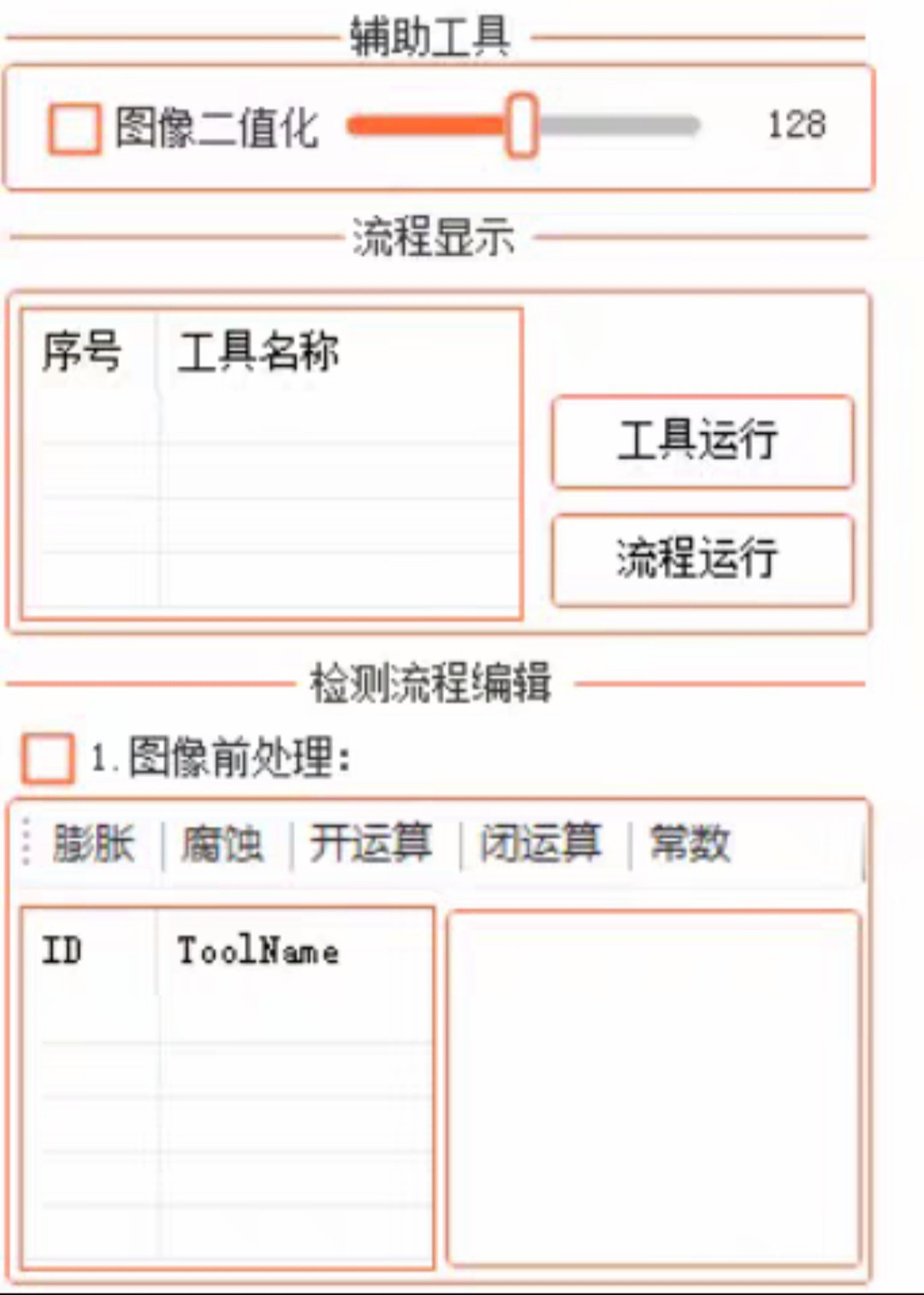
4. 图像显示与交互(VisionShowLib)
该库封装了 OpenCvSharp 的绘图功能,并扩展了工业视觉所需的交互元素:
- 结果叠加:自动将检测结果(如匹配框、边缘点、轮廓、测量线)绘制在原图上。
- 文本标注:通过
TextEx类,可方便地在图像上叠加检测得分、坐标、角度等文本信息。 - ROI 编辑:支持用户通过 UI 绘制和调整 ROI(Region of Interest),如矩形、旋转矩形等,这些区域会直接作为算法的输入参数。
工作流程
一个典型的检测任务执行流程如下:
- 初始化:加载指定配方,读取相机参数、工具列表及各工具的配置参数。
- 图像采集:通过
DeviceLib启动相机,获取实时图像。 - 前处理(可选):根据配方配置,对图像进行滤波、形态学操作等预处理。
- 工具链执行:按顺序调用
FuncToolLib中的各个工具(如先模板匹配定位,再在定位区域内进行 Blob 检测)。 - 结果整合与显示:将所有工具的运行结果通过
VisionShowLib叠加显示,并输出到日志或通信接口。 - 决策与反馈:根据检测结果(如 Blob 数量、位置偏差等)做出 OK/NG 判定,并通过串口、网口或 UI 反馈给上位机或操作员。
总结
该视觉系统是一个功能完备、架构清晰、扩展性强的工业视觉平台。它不仅集成了 OpenCV 的强大算法能力,更通过精心的工程化设计,解决了工业现场对稳定性、灵活性和易用性的严苛要求。其模块化的设计使得添加新的视觉算法或接入新型相机变得异常简单,为应对未来更复杂的视觉检测需求奠定了坚实的基础。


火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 10
10 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)