隐马尔可夫模型(HMM)前向算法最通俗的理解
HMM前向算法通俗解析 本文用生活化例子直观讲解隐马尔可夫模型(HMM)的前向算法。通过"天气-打伞"的类比,将复杂的数学公式转化为容易理解的动态过程:算法通过逐日计算三种天气状态(晴/阴/雨)的可能性,考虑前一天所有可能的转移路径,并乘以当前观测(打伞/不打伞)的概率。最终将所有可能路径的概率相加,得到整个观测序列出现的总概率。核心思想可概括为:当前状态概率=(前一天各状态转
🌟 隐马尔可夫模型(HMM)前向算法最通俗的理解
隐马尔可夫模型(HMM)是序列问题中最经典的模型之一。
如果你第一次接触 HMM 的前向算法(Forward Algorithm),可能会被公式吓到:
αt(i)=[∑j=1Nαt−1(j)P(si∣sj)]×P(ot∣si)\alpha_t(i)=\left[\sum_{j=1}^{N}\alpha_{t-1}(j)P(s_i|s_j)\right] \times P(o_t|s_i)αt(i)=[j=1∑Nαt−1(j)P(si∣sj)]×P(ot∣si)
其实它的含义 非常生活化、非常直观。
本文用生活例子 + 图像化思维,把 HMM 预测过程讲到你“闭眼都能想象”的程度。
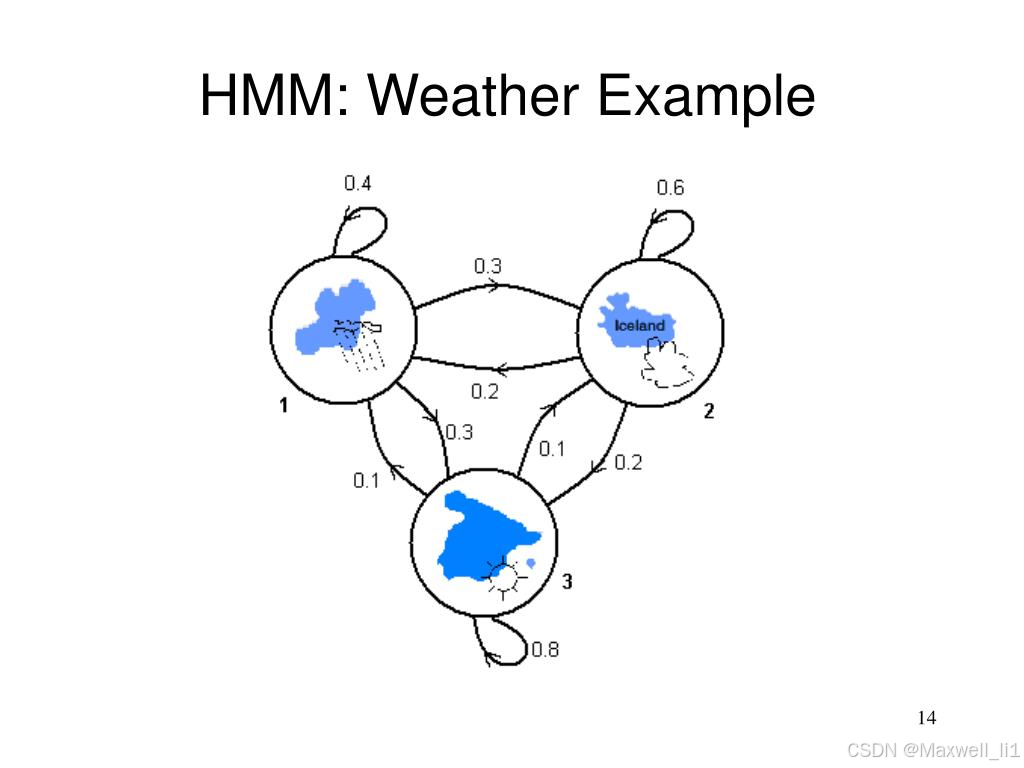
一、HMM 的基本设定(生活类比)
我们用一个极易理解的例子:
-
隐藏状态(你看不到):天气
- Sunny
- Cloud
- Rain
-
可观测值(你能看到):别人是否打伞
- Umbrella
- No Umbrella
HMM 的作用就是:
虽然你不能看到真正的天气,但你可以通过“是否打伞”的序列,推测这个序列出现的概率有多大。
二、前向算法要解决什么问题?
前向算法(Forward Algorithm)计算的是:
P(O)=P(观测序列) P(O) = P(\text{观测序列}) P(O)=P(观测序列)
也就是:
“在这个天气模型下,我们连续看到打伞/不打伞的现象,整体出现的概率是多少?”
比如观测序列是:
[打伞, 打伞, 不打伞]
我们要算这串观测出现的总概率。
看似困难,但前向算法把这个复杂问题拆解为:
每一天可能是 Sunny、Cloud、Rain;
对每种天气,我们计算它通向今天的可能性,再乘以今天的观测概率.
三、前向算法的直观过程(不看公式也能懂)
假设观测为:
Day1: 打伞
Day2: 打伞
Day3: 不打伞
对于每一天,我们维护三种天气的概率:
- 今天 Sunny 的可能性
- 今天 Cloud 的可能性
- 今天 Rain 的可能性
每一天都从昨天延伸过来。
Step 1:第一天(t=1)
第一天看到“打伞”。
对于每种天气:
α1(Sunny)=P(Sunny)×P(打伞∣Sunny) \alpha_1(\text{Sunny}) = P(\text{Sunny})\times P(\text{打伞}|Sunny) α1(Sunny)=P(Sunny)×P(打伞∣Sunny)
α1(Cloud)=P(Cloud)×P(打伞∣Cloud) \alpha_1(\text{Cloud}) = P(\text{Cloud})\times P(\text{打伞}|Cloud) α1(Cloud)=P(Cloud)×P(打伞∣Cloud)
α1(Rain)=P(Rain)×P(打伞∣Rain) \alpha_1(\text{Rain}) = P(\text{Rain})\times P(\text{打伞}|Rain) α1(Rain)=P(Rain)×P(打伞∣Rain)
这一步完全是“初始概率 × 观测概率”。
Step 2:第二天(t=2)
第二天又看到“打伞”。
要算“今天是 Sunny”的可能性,必须考虑所有“昨天”的路径:
- 昨天 Sunny → 今天 Sunny
- 昨天 Cloud → 今天 Sunny
- 昨天 Rain → 今天 Sunny
每条路径都有:
昨天该状态的可能性 × 状态转移概率
然后全部加起来:
(来自昨天的所有 Sunny 路径)=α1(S)P(S→S)+α1(C)P(C→S)+α1(R)P(R→S) \text{(来自昨天的所有 Sunny 路径)} = \alpha_1(S)P(S→S)+\alpha_1(C)P(C→S)+\alpha_1(R)P(R→S) (来自昨天的所有 Sunny 路径)=α1(S)P(S→S)+α1(C)P(C→S)+α1(R)P(R→S)
最后还要乘上“Sunny 天看到打伞”的概率:
α2(S)=[α1(S)P(S→S)+α1(C)P(C→S)+α1(R)P(R→S)]×P(打伞∣S) \alpha_2(S)=\left[ \alpha_1(S)P(S→S)+\alpha_1(C)P(C→S)+\alpha_1(R)P(R→S) \right] \times P(\text{打伞}|S) α2(S)=[α1(S)P(S→S)+α1(C)P(C→S)+α1(R)P(R→S)]×P(打伞∣S)
同理可得:
- 今天是 Cloud 的概率
- 今天是 Rain 的概率
Step 3:第三天(t=3)
做法完全一致:
- 从 Day2 的三种天气延伸三条路径
- 加总
- 乘以“不打伞”的概率
得到:
α3(S), α3(C), α3(R) \alpha_3(S),\ \alpha_3(C),\ \alpha_3(R) α3(S), α3(C), α3(R)
Step 4:最终结果
P(O)=α3(S)+α3(C)+α3(R) P(O)=\alpha_3(S)+\alpha_3(C)+\alpha_3(R) P(O)=α3(S)+α3(C)+α3(R)
它表示:
从所有可能天气路径(S/C/R)出发,能解释我们看到的观测序列的总概率。
这就是前向算法所有内容。
四、核心公式到底在干什么?(最通俗解释)
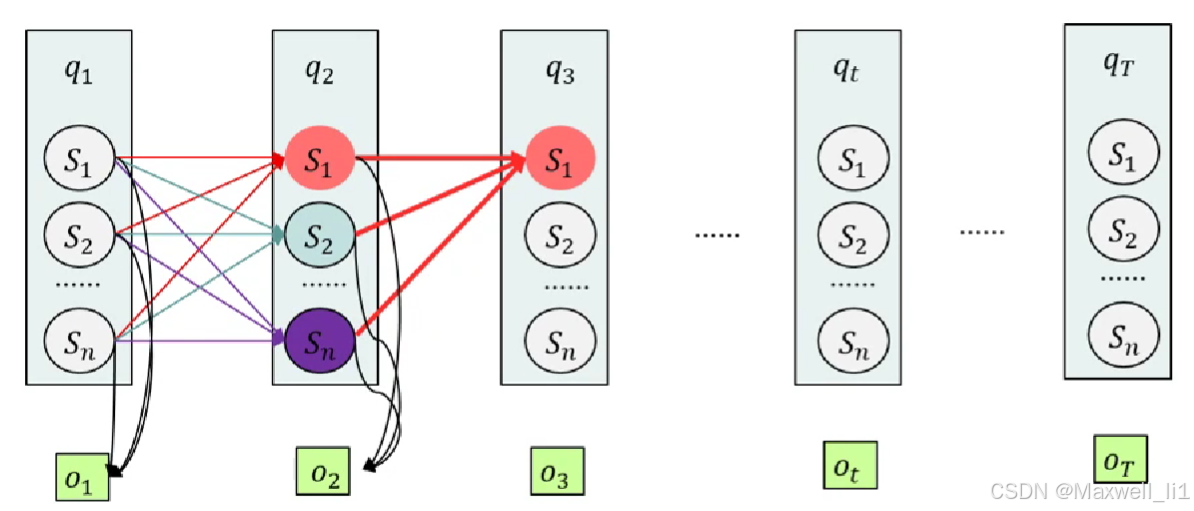
把重点公式再看一遍:
αt(i)=[∑j=1Nαt−1(j)P(si∣sj)]×P(ot∣si) \alpha_t(i)=\left[\sum_{j=1}^{N}\alpha_{t-1}(j)P(s_i|s_j)\right] \times P(o_t|s_i) αt(i)=[j=1∑Nαt−1(j)P(si∣sj)]×P(ot∣si)
每一部分的直觉:
✔ ( at−1(j)a_{t-1}(j)at−1(j))
昨天是状态 j 的概率
(所有可能的昨天)
✔ (P(si∣sj)P(s_i|s_j)P(si∣sj))
昨天是 j,今天转移到 i 的概率
(状态转移概率)
✔ 相加(ΣΣΣ)
所有“昨天 → 今天 i 的路径”相加
(因为这些路径都可能导致今天是 i)
✔ 最后乘 (P(ot∣si)P(o_t|s_i)P(ot∣si))
因为今天我们看到了 “打伞/不打伞”
必须乘上“状态 i 产生该观测的概率”
五、用一句废话总结(但你永远不会忘)
“今天是某个状态的概率 =
(昨天各种状态到今天的路径概率相加)
×(今天该状态能解释当前观测的能力)”
这个过程重复 T 天,就能得到整串观测的总概率。

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 19
19 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)