WARNING: No valid Webots directory specified in `ROS2_WEBOTS_HOME` and `WEBOTS_HOME`的解决方案
摘要:出现Webots环境变量未正确设置的警告,系统默认使用/usr/local/webots路径。解决方法:1)确认Webots实际安装路径;2)在shell配置文件(如.bashrc)中添加export WEBOTS_HOME=/usr/local/webots和export ROS2_WEBOTS_HOME=/usr/local/webots(替换为实际路径);3)执行source ~/.b
问题截图
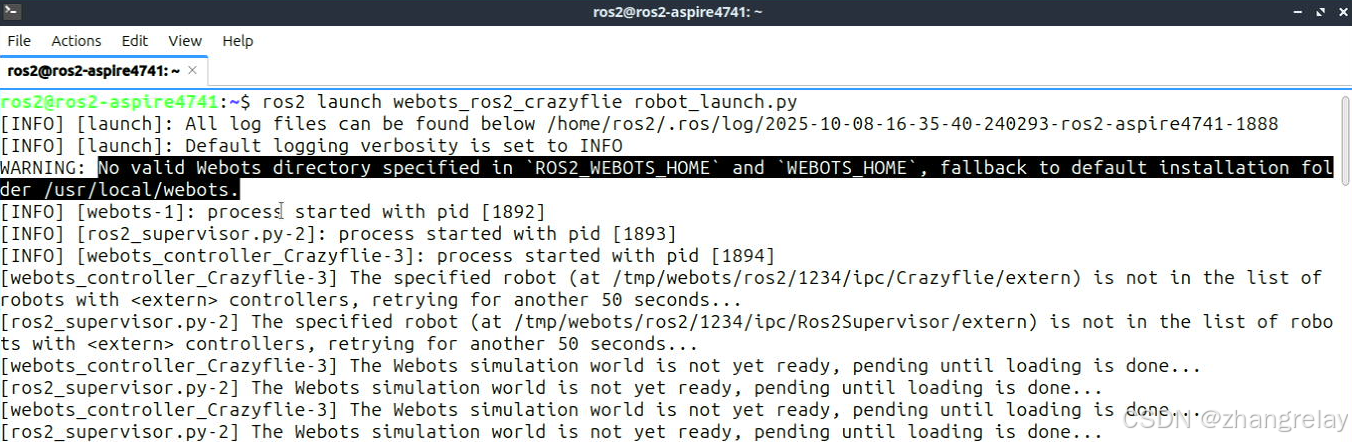
crazyflie

epuck
原因
环境变量没有正确设置,系统选择默认值。
思考
进行相应配置。
export WEBOTS_HOME=/usr/local/webots
export ROS2_WEBOTS_HOME=/usr/local/webots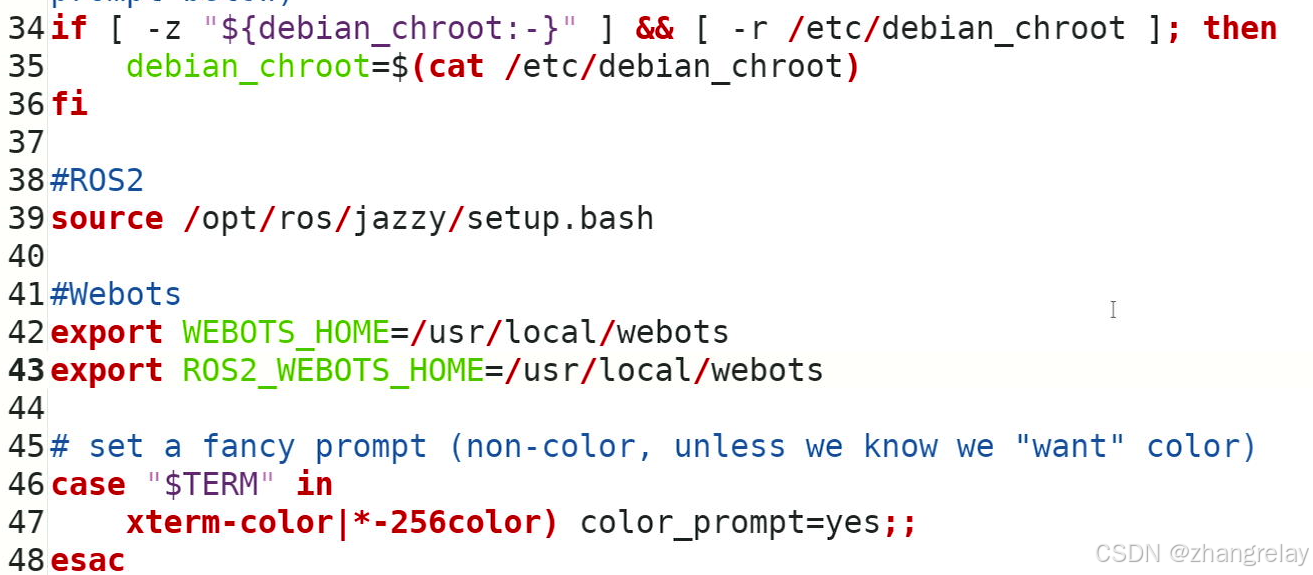
AI解决
这个警告表明,Webots 的环境变量 ROS2_WEBOTS_HOME 和 WEBOTS_HOME 没有被正确设置,系统正在回退到默认的安装路径 /usr/local/webots。要解决这个问题,你需要确保 Webots 的环境变量被正确配置。
以下是解决方案:
-
确认 Webots 的安装路径:
首先,确认 Webots 的实际安装路径。默认情况下,Webots 通常安装在/usr/local/webots,但如果你在安装时选择了不同的路径,你需要使用实际的安装路径。 -
设置环境变量:
根据你的 shell 类型(如 bash、zsh 等),将以下内容添加到你的 shell 配置文件中(如~/.bashrc、~/.zshrc等):bashexport WEBOTS_HOME=/usr/local/webotsexport ROS2_WEBOTS_HOME=/usr/local/webots如果 Webots 安装在其他路径,请将
/usr/local/webots替换为实际的安装路径。 -
使更改生效:
运行以下命令使更改生效:bashsource ~/.bashrc # 或者 source ~/.zshrc,取决于你使用的 shell -
验证环境变量:
运行以下命令验证环境变量是否设置成功:bashecho $WEBOTS_HOMEecho $ROS2_WEBOTS_HOME确保输出的是正确的 Webots 安装路径。
-
重新启动 Webots 或终端:
有时候,更改环境变量后需要重新启动 Webots 或终端才能生效。
通过以上步骤,你应该能够解决这个警告问题。如果问题仍然存在,可能需要检查 Webots 是否正确安装,或者是否有其他配置冲突。
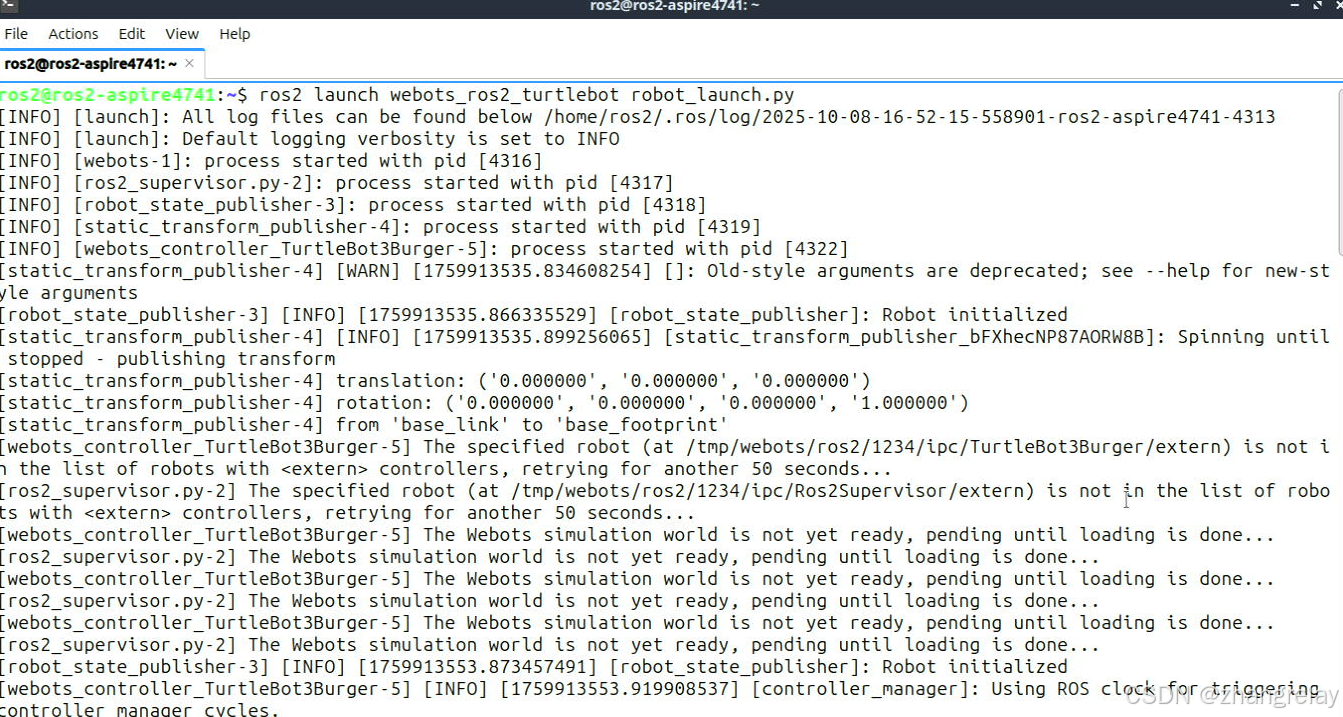
测试
摘要:出现Webots环境变量未正确设置的警告,系统默认使用/usr/local/webots路径。解决方法:1)确认Webots实际安装路径;2)在shell配置文件(如.bashrc)中添加export WEBOTS_HOME=/usr/local/webots和export ROS2_WEBOTS_HOME=/usr/local/webots(替换为实际路径);3)执行source ~/.bashrc使配置生效;4)通过echo $WEBOTS_HOME验证变量;5)必要时重启终端或Webots。若问题持续,需检查安装或配置冲突。
Bash 配置 ROS2 与 Webots 联合仿真详细教程(万字级)
一、环境准备与系统要求
1.1 操作系统要求
- Ubuntu 22.04 LTS(推荐)或 20.04 LTS
- 内存 ≥ 8GB(仿真复杂场景需 16GB+)
- 显卡支持 OpenGL 3.0+(推荐 NVIDIA 显卡)
1.2 软件版本兼容性
| 软件 | 版本要求 | 备注 |
|---|---|---|
| ROS2 | Humble/Iron | 与 Webots R2023b+ 兼容 |
| Webots | R2023b/R2024a | 需与 ROS2 版本匹配 |
| Python | 3.10+ | ROS2 Humble 默认依赖 |
1.3 安装前检查
bash
# 检查系统信息 |
lsb_release -a |
uname -m # 需为 x86_64 |
# 更新软件包列表 |
sudo apt update && sudo apt upgrade -y |
二、ROS2 安装与配置
2.1 添加 ROS2 仓库
bash
# 设置软件源与密钥 |
sudo apt install curl gnupg lsb-release |
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg |
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] https://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $VERSION_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null |
2.2 安装 ROS2 Humble
bash
# 基础版安装(约 800MB) |
sudo apt install ros-humble-desktop |
# 完整版安装(含仿真工具,约 2.5GB) |
sudo apt install ros-humble-desktop-full |
# 验证安装 |
source /opt/ros/humble/setup.bash |
ros2 version |
2.3 配置 ROS2 环境变量
bash
# 永久生效配置 |
echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc |
echo "export ROS_DOMAIN_ID=0" >> ~/.bashrc # 多机通信时需修改 |
echo "export ROS_LOCALHOST_ONLY=0" >> ~/.bashrc # 允许跨主机通信 |
source ~/.bashrc |
# 验证环境变量 |
printenv | grep -i ROS |
关键变量说明:
ROS_DOMAIN_ID:ROS2 网络通信域标识(0-232),相同 ID 的节点可通信ROS_LOCALHOST_ONLY:设为 1 时仅允许本地通信
三、Webots 安装与配置
3.1 官方仓库安装(推荐)
bash
# 添加 Webots 仓库 |
sudo sh -c 'echo "deb [arch=amd64] https://www.cyberbotics.com/webots/files/archive/ubuntu $(lsb_release -cs) main" > /etc/apt/sources.list.d/webots.list' |
wget -qO- https://www.cyberbotics.com/webots/files/archive/ubuntu/cyberbotics.key | sudo apt-key add - |
# 安装 Webots |
sudo apt update |
sudo apt install webots |
3.2 手动安装(指定版本)
bash
# 下载指定版本(示例:R2024a) |
wget https://github.com/cyberbotics/webots/releases/download/R2024a/webots-R2024a-x86_64.tar.bz2 |
tar xjf webots-R2024a-x86_64.tar.bz2 |
sudo mv webots /opt/ |
# 配置环境变量 |
echo "export WEBOTS_HOME=/opt/webots" >> ~/.bashrc |
echo "export PATH=\$PATH:\$WEBOTS_HOME/bin" >> ~/.bashrc |
source ~/.bashrc |
3.3 验证安装
bash
# 启动 Webots |
webots |
# 检查版本 |
webots --version |
四、ROS2-Webots 接口安装
4.1 安装接口包
bash
# 方法一:通过 apt 安装(推荐) |
sudo apt install ros-humble-webots-ros2 |
# 方法二:源码编译(需先安装 colcon) |
sudo apt install python3-colcon-common-extensions |
mkdir -p ~/webots_ws/src |
cd ~/webots_ws/src |
git clone https://github.com/cyberbotics/webots_ros2.git |
cd .. |
rosdep install --from-paths src --ignore-src -y |
colcon build --symlink-install |
# 配置工作空间 |
echo "source ~/webots_ws/install/setup.bash" >> ~/.bashrc |
source ~/.bashrc |
4.2 验证接口功能
bash
# 启动 EPuck 机器人仿真 |
ros2 launch webots_ros2_epuck robot_launch.py |
# 检查节点与话题 |
ros2 node list # 应显示 /webots_ros2_epuck_driver |
rostopic list # 应包含 /odom, /cmd_vel 等 |
五、联合仿真开发流程
5.1 创建自定义机器人模型
- 在 Webots 中设计 URDF:
- 使用 Webots 的
Robot节点创建模型 - 导出为 URDF 格式(File > Export > URDF)
- 使用 Webots 的
- 转换为 Webots 专用格式:
bash# 使用 webots_ros2 工具转换ros2 run webots_ros2 urdf2webots my_robot.urdf my_robot.wbo
5.2 编写 ROS2 控制器
python
#!/usr/bin/env python3 |
import rclpy |
from rclpy.node import Node |
from geometry_msgs.msg import Twist |
class RobotController(Node): |
def __init__(self): |
super().__init__('robot_controller') |
self.subscription = self.create_subscription( |
Twist, '/cmd_vel', self.cmd_vel_callback, 10) |
self.get_logger().info('Controller node started') |
def cmd_vel_callback(self, msg): |
self.get_logger().info(f'Received velocity: {msg.linear.x}') |
def main(): |
rclpy.init() |
node = RobotController() |
rclpy.spin(node) |
rclpy.shutdown() |
if __name__ == '__main__': |
main() |
5.3 创建 Launch 文件
python
from launch import LaunchDescription |
from launch_ros.actions import Node |
def generate_launch_description(): |
return LaunchDescription([ |
Node( |
package='my_package', |
executable='robot_controller', |
name='controller' |
), |
Node( |
package='webots_ros2', |
executable='webots_launcher', |
arguments=['--mode=realtime', 'my_world.wbt'] |
) |
]) |
六、高级配置与调试
6.1 多机器人仿真配置
bash
# 为每个机器人设置独立域名 |
echo "export ROS_DOMAIN_ID=1" >> ~/.bashrc_robot1 |
echo "export ROS_DOMAIN_ID=2" >> ~/.bashrc_robot2 |
# 启动不同域的仿真 |
source ~/.bashrc_robot1 |
ros2 launch webots_ros2 multi_robot_launch.py |
6.2 性能优化
-
物理引擎参数调整:
xml<!-- 在 Webots 世界文件中修改 --><PhysicsEngine><ODE><ERP>0.2</ERP> <!-- 误差减少参数 --><CFM>1e-5</CFM> <!-- 约束力混合参数 --></ODE></PhysicsEngine> -
ROS2 参数服务器配置:
bashros2 param set /webots_ros2_driver physics_step 0.016 # 设置物理步长为 16ms
6.3 常见问题解决
| 问题现象 | 解决方案 |
|---|---|
| 找不到 Webots 路径 | 检查 WEBOTS_HOME 环境变量,确保指向正确安装目录 |
| ROS2 节点无法通信 | 确认 ROS_DOMAIN_ID 一致,检查防火墙设置 |
| 仿真卡顿 | 降低物理引擎步长(如从 0.008s 改为 0.016s),关闭非必要传感器 |
| URDF 导入失败 | 检查模型坐标系是否正确,确保所有链接有惯性参数 |
七、完整工作流示例
7.1 项目初始化
bash
mkdir -p ~/ros2_webots_project/src |
cd ~/ros2_webots_project/src |
git clone https://github.com/your-repo/custom_robot.git |
cd .. |
rosdep install --from-paths src --ignore-src -y |
colcon build --symlink-install |
7.2 启动仿真
bash
# 终端 1:启动 Webots |
source install/setup.bash |
webots my_world.wbt |
# 终端 2:启动 ROS2 控制器 |
source install/setup.bash |
ros2 launch custom_robot control_launch.py |
# 终端 3:监控数据 |
ros2 topic echo /odom |
7.3 调试技巧
- 使用
rqt_graph可视化节点连接:bashros2 run rqt_graph rqt_graph - 日志分析:
bashros2 node info /webots_ros2_driver # 查看节点订阅/发布话题tail -f ~/.ros/log/latest/log*.txt # 查看实时日志
八、版本升级与维护
8.1 升级 ROS2
bash
sudo apt update |
sudo apt upgrade ros-humble-* |
8.2 升级 Webots
bash
# 方法一:通过包管理器 |
sudo apt install --only-upgrade webots |
# 方法二:手动升级 |
sudo systemctl stop webots # 如果设置了服务 |
wget 新版本下载链接 |
tar xjf 新版本.tar.bz2 |
sudo mv 新版本目录 /opt/webots |
8.3 备份配置
bash
# 备份环境变量 |
cat ~/.bashrc | grep -E 'ROS|WEBOTS' > backup_env.sh |
# 备份工作空间 |
cd ~/ros2_webots_project |
tar cjf project_backup.tar.bz2 src install log |

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 24
24 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)