虚幻引擎UE5专用服务器游戏开发-10 添加足部IK
·
目标:添加足部IK,让角色在坡道能自然站立,不会悬空!


一、 添加足部IK
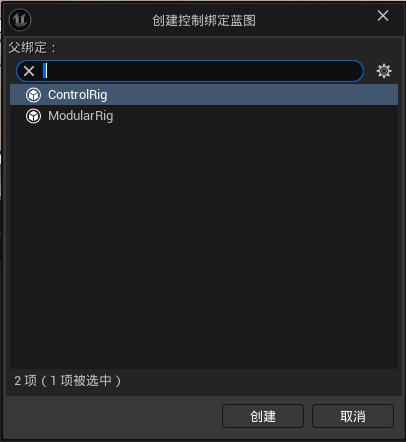
1.创建控制绑定:CR_CrunchIKFoot:

2.指定层级结构:
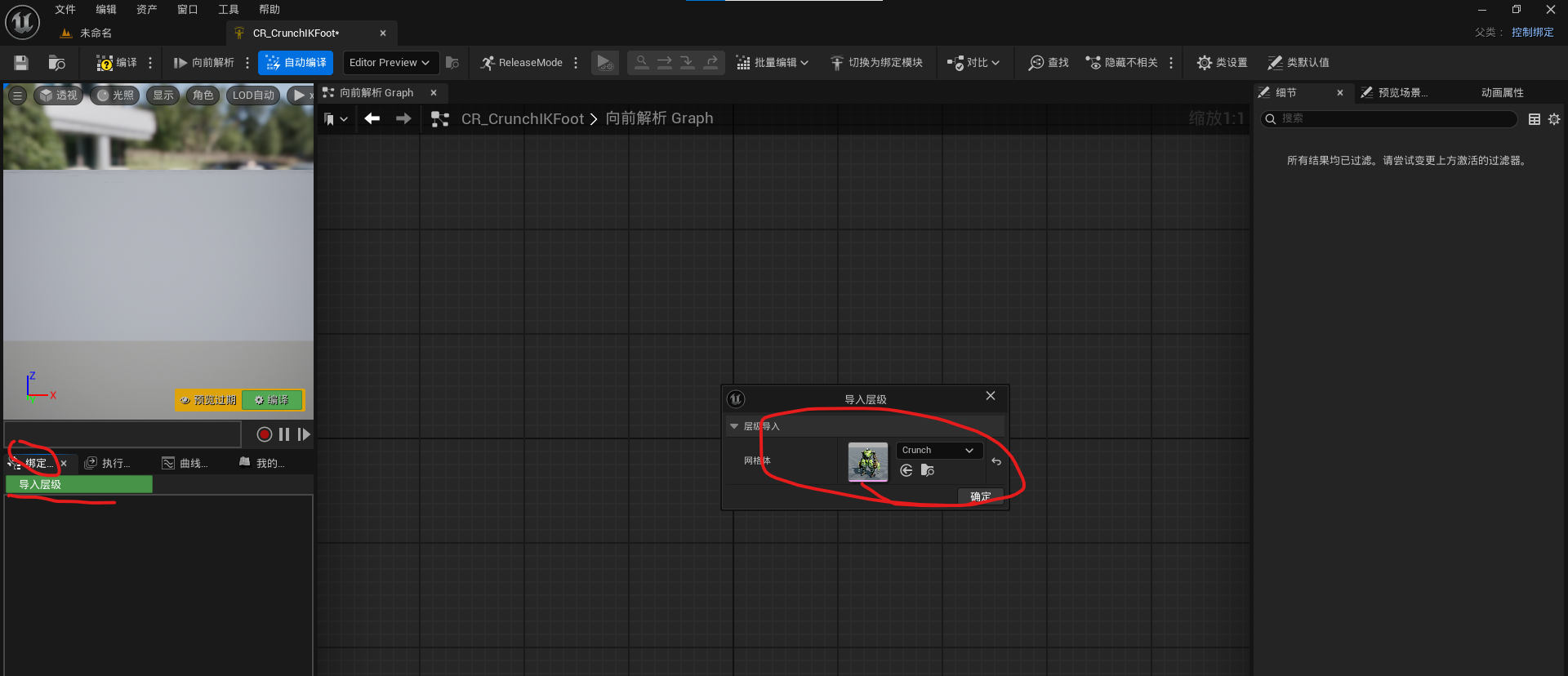
如图:
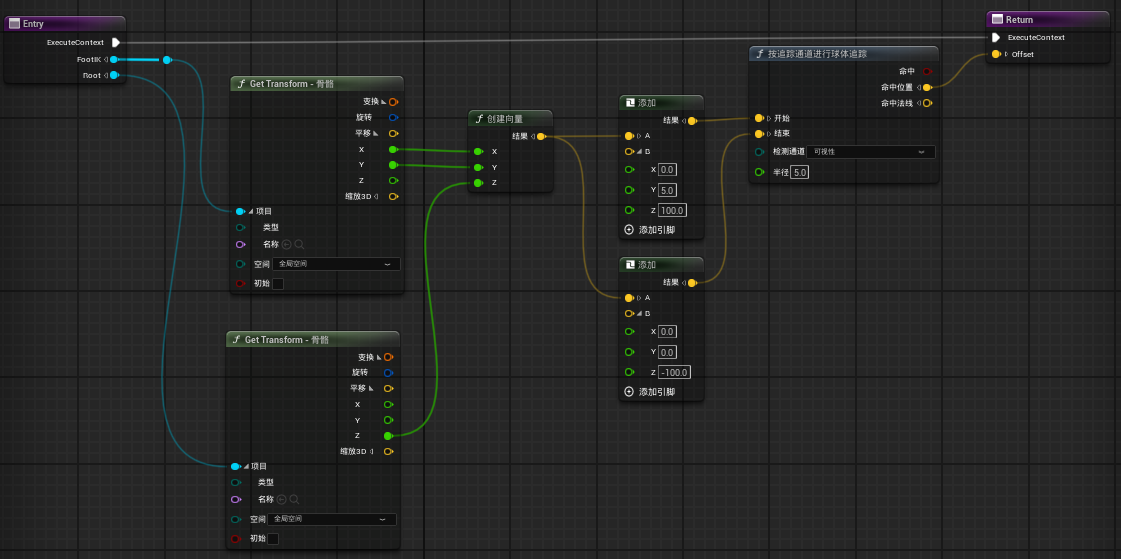
3.获取骨骼:
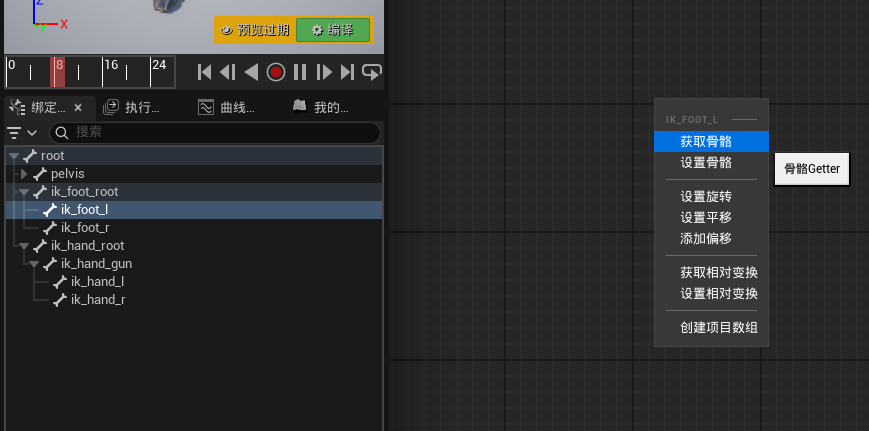

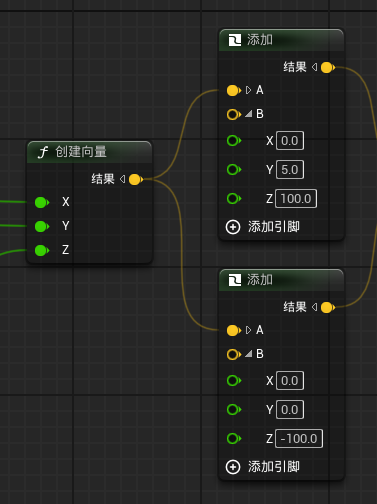
创建向量:
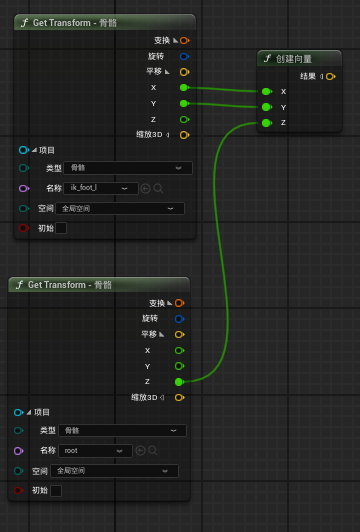
4.确定起点和终点:
再root高度加100和-100,Y轴加5:
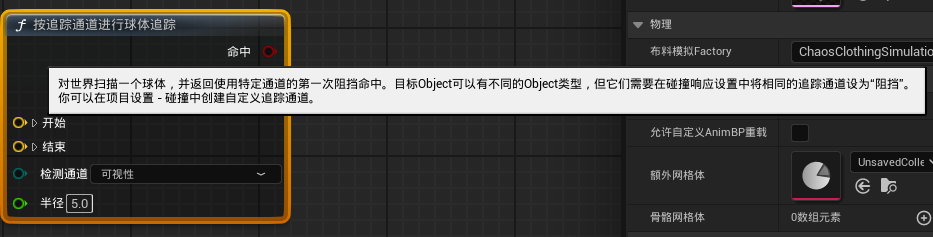
5.球体追踪:

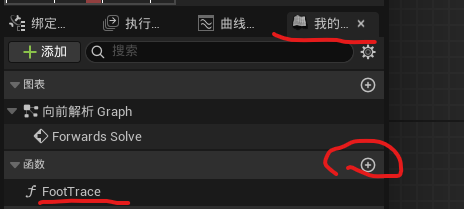
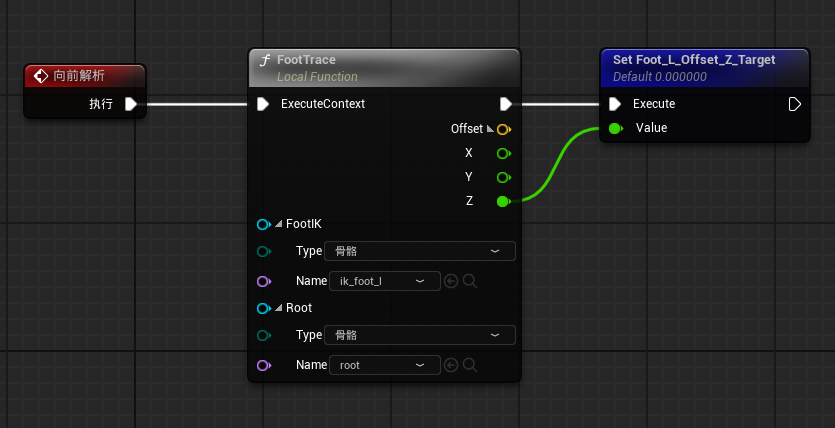
6.建立函数:FootTrace
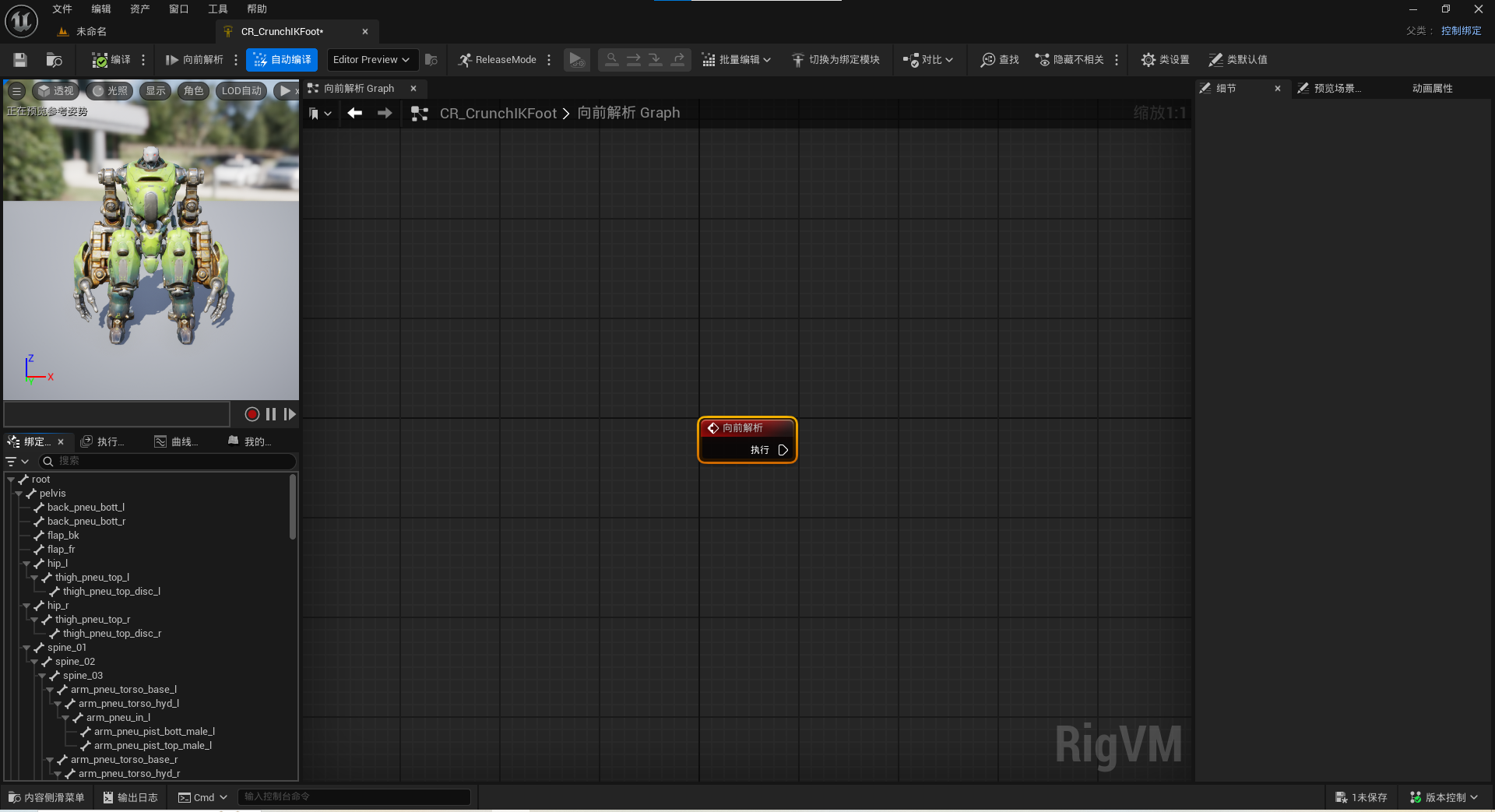
7.向前解析Graph:调用函数
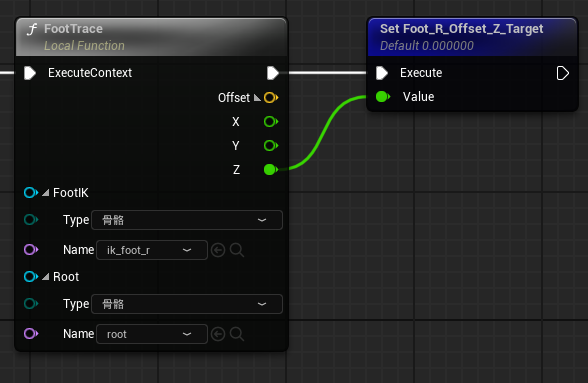
再调用右脚追踪:
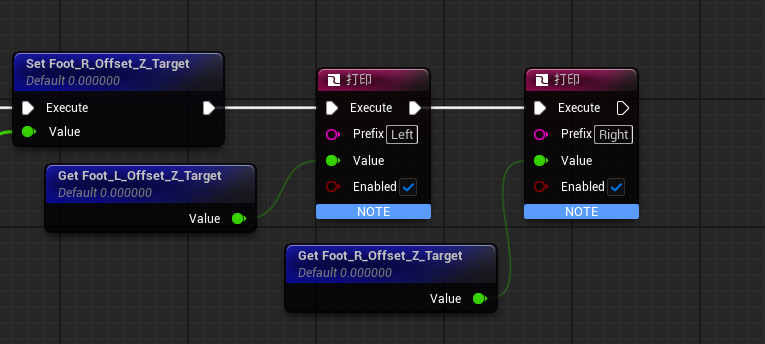
8.打印调试:
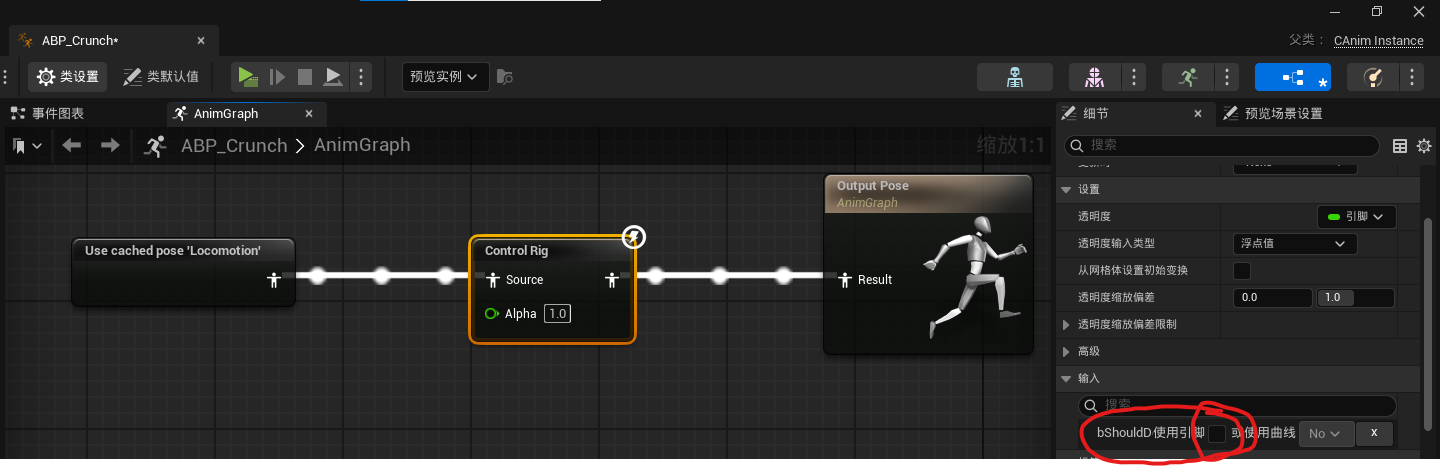
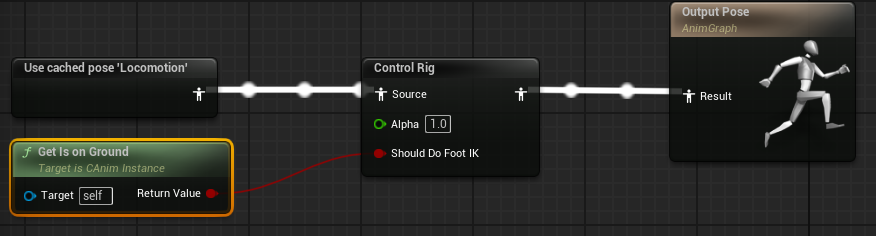
9.进入动画蓝图:添加Control Rig节点

二、偏移关节
目标:用0.5秒完成脚步过去
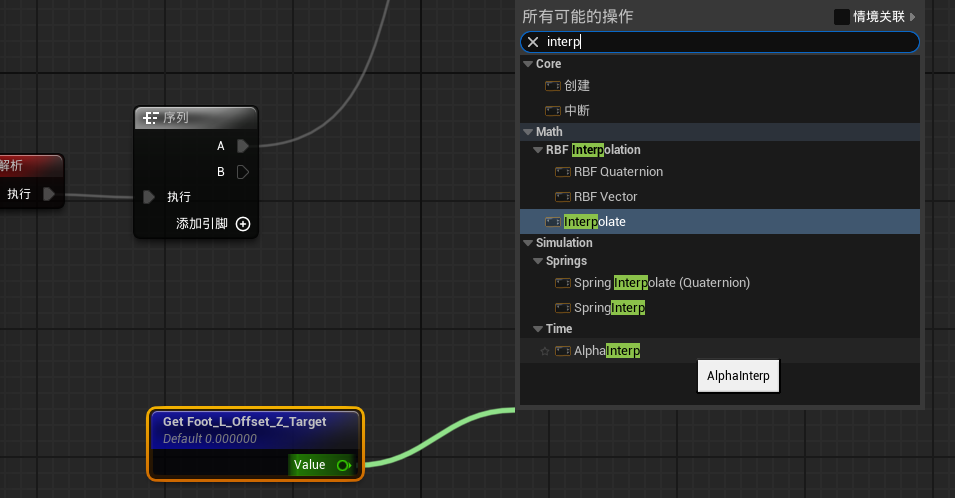
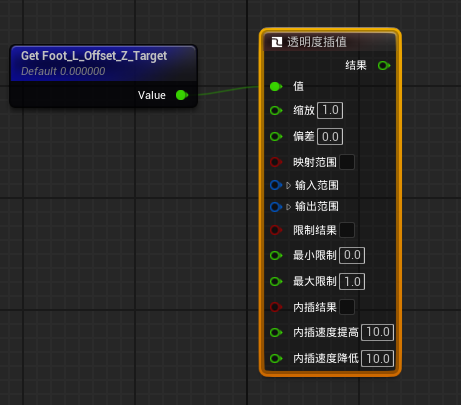
1.使用插值:AlphaInterp

同理,右脚也是插值:

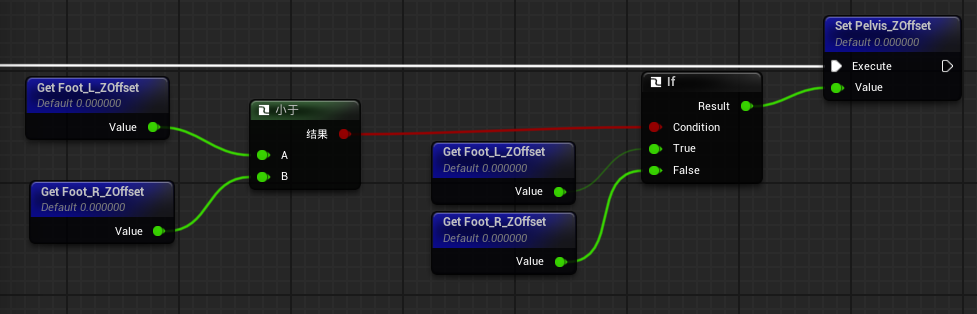
2.比较两个值,取最小的值,确定骨盆的位置
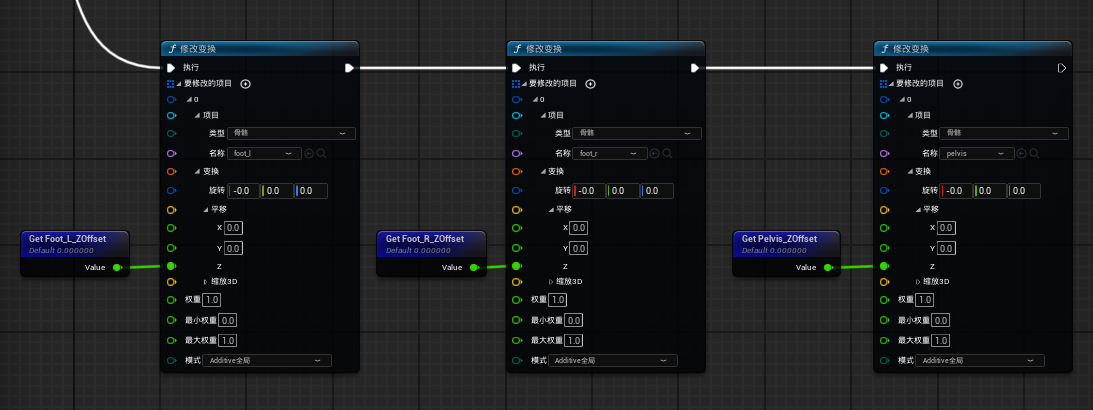
3.修改变换:ModifyTransforms
(1)

将两个腿、骨盆变换:
效果:

(2)不完美,接着查看原因:

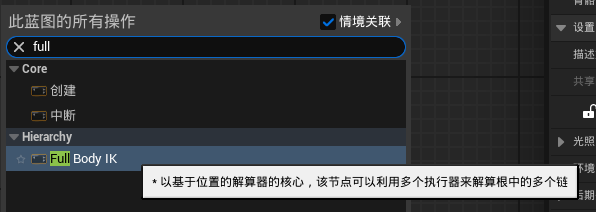
接着进行全身IK:

效果:

(3)我们再调整腿部设置,防止腿部乱动:
小腿骨限制:


(4)但是,在斜坡跳跃时,腿不正常,我们希望在IK之前,有一个判断,当不要IK控制时,那些值设置为0:
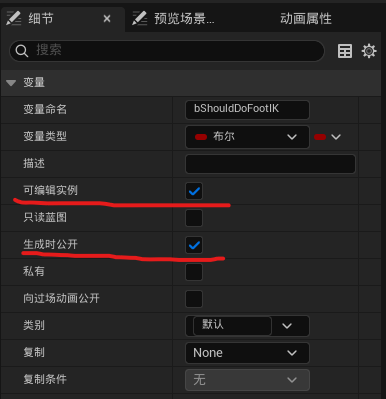
添加一个bool变量:
设为:
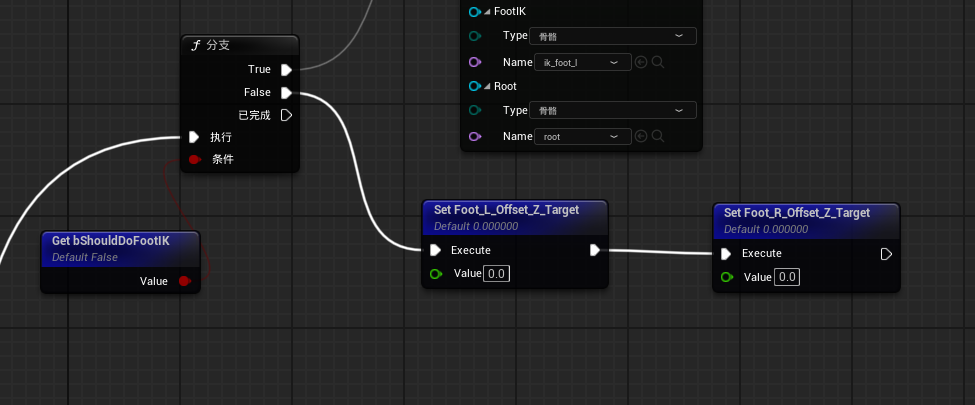
到动画蓝图:
只有在地面上时,才实现脚步IK

中国智能体开发者社区,聚焦智能体与大模型开发,提供前沿资讯、实用工具链、开源项目及行业案例。通过技术沙龙、开发者大赛等活动,促进经验交流与协作,助力开发者快速构建创新智能应用。
更多推荐
 14
14 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)