从数据处理到智能物理交互:无线具身大模型新范式
当前无线AI模型因与物理世界脱节,依赖离线数据和统计知识,难以应对动态、非平稳的真实环境,导致系统鲁棒性不足 。为解决此问题,研究人员提出了无线具身大模型(WELAI)新范式,推动AI从被动观察者向主动参与者转变 。WELAI基于物理接地、具身因果学习和系统级具身智能三大核心原则 ,让智能体通过多模态感知、智能核心决策与物理执行器,在与环境的持续闭环互动中学习物理因果,主动塑造无线环境 。其最终目
原文链接:[2506.24009] Bridging Physical and Digital Worlds: Embodied Large AI for Future Wireless Systems
当前应用于无线系统的大型AI模型在网络优化与控制方面展现了潜力。然而,这些模型在实际应用中面临一个根本性瓶颈:它们大多将智能体视为一个虚拟、孤立的信息处理单元,将其与物理世界相隔离,也缺少通过“身”(具体器件)来与动态物理无线环境的系统性互动机制。
这些模型主要依赖离线数据集进行学习,难以处理现实环境中动态变化的无线通信环境,也缺乏通过主动探测、感知来进行自适应的能力。这导致AI的决策基于训练数中的统计知识,而非对现实世界物理规则的深刻理解,造成系统缺少鲁棒性和真正的自适应性,难以满足真实世界的应用要求。
例如,一个AI模型可以识别图像中的车辆,却无法从本质上理解该车辆会如何影响无线信号的传播,因为它缺少将知识与物理因果联系起来的机制。这种局限性导致AI在复杂多变的真实场景中表现不佳,适应性和鲁棒性不足。
为应对这些挑战,研究人员共同提出了一种名为“无线具身大模型”(Wireless Embodied Large AI, WELAI)的全新范式。WELAI的核心在于推动AI从无线系统被动的观察者转变为主动的参与者,通过与物理环境持续的闭环互动来学习和进化。
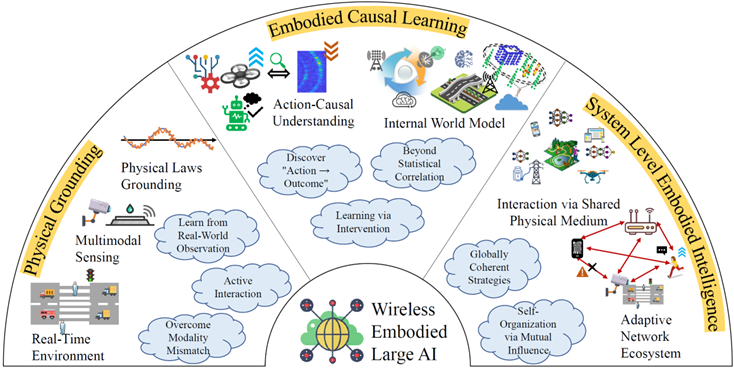
WELAI的三大核心原则
WELAI范式建立在三个关键原则之上,这些原则重新定义了AI模型与物理世界的关系。
-
物理根基 (Physical Grounding) AI的所有知识都需要锚定在真实世界的物理规律上。它通过多模态传感器(如摄像头、激光雷达)和无线射频传感器,将外部感知与无线现象直接关联。例如,一个WELAI智能体通过激光雷达感知到前方的卡车,并同时测量到接收信号强度的显著下降,从而在“物理遮挡”和“信号衰减”之间建立了直接的、可解释的因果联系。
-
具身因果学习 (Embodied Causal Learning) 该原则强调AI通过主动的物理干预来发现行为与结果之间的因果链条,而不仅仅是学习数据中的统计相关性。一个传统模型可能知道信号差与高误码率相关,但一个WELAI智能体能通过主动“降低自身发射功率”这一物理动作,亲身验证这个行为导致了信号质量下降。这种通过主动试错和感知反馈来构建因果世界模型的方式,是其智能的核心。
-
系统级具身智能 (System-Level Embodied Intelligence) 此原则指出,全局性的、协调一致的系统行为可以从多个智能体的去中心化互动中自发“涌现”。智能体之间通过共享的物理介质(即无线环境)相互影响并隐性沟通。例如,当一个基站感知到来自无人机的干扰时,它会更新其因果模型,将干扰理解为无人机行为的结果,并可能利用博弈论等方法预测其未来行为,从而主动调整自身接收策略,实现无需中央控制的协同适应。
WELAI系统架构:一个“感知-决策-行动”的闭环
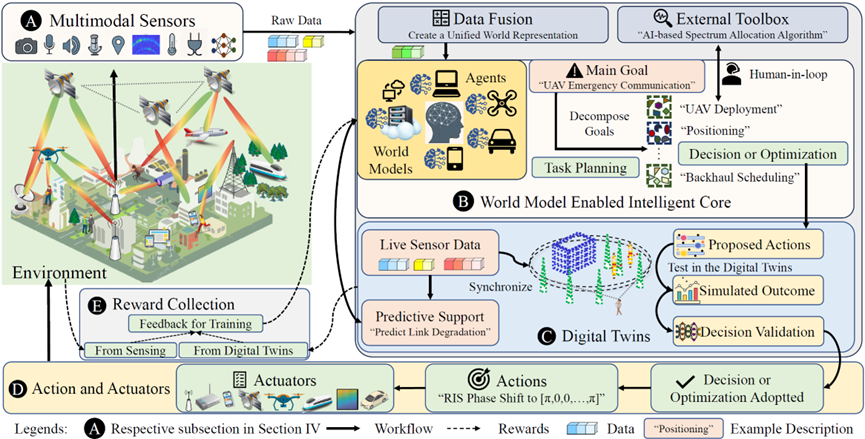
为实现上述原则,WELAI的系统架构被设计为一个协同工作的整体。
-
A. 多模态传感器:作为系统的“感知”单元,融合射频、视觉、雷达、激光雷达等多源异构数据,为智能核心创建统一的世界表征。
-
B. 世界模型驱动的智能核心:作为系统的“大脑”,负责通过交互建立对通信环境和规律的认知,满足“物理根基”原则。同时,智能核心需要处理数据、进行任务规划和决策优化。面对复杂目标,如“应急通信保障”,它可以将其分解为无人机部署、动态定位等一系列可执行的子任务。
-
C. 数字孪生:一个高保真的虚拟环境,作为决策的安全“沙箱”。AI在将策略部署到现实世界前,可在此进行快速、无风险的测试与验证,从而加速学习并确保安全。
-
D. 行动与执行器:作为系统的“执行”单元,将决策转化为物理世界的真实行动,例如调整智能反射面(RIS)的参数或无人机的位置;同时,通过执行器的执行帮助智能核心。
-
E. 环境反馈与奖励:行动对环境造成的影响被传感器捕捉,并形成奖励信号,反馈给智能核心,用于评估策略效果并指导下一轮学习,从而闭合整个“感知-决策-行动-学习”的循环。
案例研究:WELAI在智能驾驶中的表现
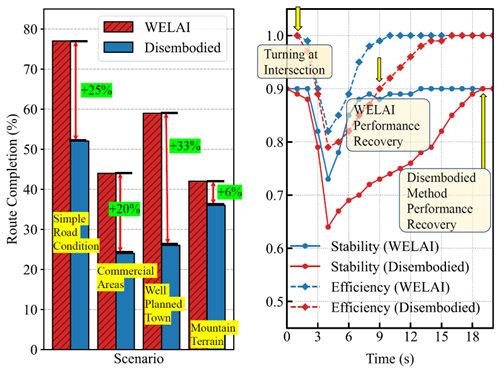
为了验证WELAI范式的有效性,作者提供了一项应用于智能车载网络的案例,用以展示具身智能在感知和决策方面的效果提升。他们将一个基于WELAI思想设计的智能体与一个传统的、基于数据融合的“无实体”AI模型进行了对比测试。
结果显示WELAI具有明显优势,其任务成功率更高,适应性与恢复能力更强。在一个规划良好的城镇场景中,WELAI智能体的路线完成率达到了约59%,远超基线,模型的26%。这一优势在包括山区道路在内的所有测试环境中均得以保持。在通过交叉口进行转弯的复杂操作中,WELAI智能体的车辆稳定性(舒适度)和效率指标下降幅度更小,且性能恢复速度是基线模型的两倍,仅需约9秒即可恢复稳定。
未来研究方向和关键技术
和为推动WELAI从概念走向现实,原文作者指出了五个环环相扣的关键研究方向,旨在打通从物理接口到智能核心,再到系统协议的全链路。
-
先进物理感知与交互:核心是发展超低延迟的感知-执行硬件与先进的多模态融合算法,以实现智能体与物理环境之间紧密、实时的互动闭环。
-
专用的边缘模型架构:研究重点是创建能理解物理因果、而非仅仅进行统计学习的无线基础模型,并通过高效架构与压缩技术,解决其在无线边缘部署的计算与能耗限制。
-
语言驱动控制与人机协同:旨在让智能体能通过自然语言交互理解复杂的人类指令,并发展出能适应环境长期变化的持续学习能力。
-
外部工具调用与多智能体协调:该方向研究如何让智能体高效地调用外部成熟的算法库来解决特定问题,并为多个智能体之间的去中心化协作制定标准化的通信与协商机制。
-
通往标准化的新路径:研究的核心是设计一套新的标准,用动态的、能保证安全的“智能护栏”和灵活的API接口,来取代传统的静态规则,从而在保证网络稳定性的前提下,最大程度地释放WELAI的自适应潜力。
结论
WELAI通过物理根基、具身因果学习和系统级智能,能够有效提升AI在复杂动态环境中的决策可靠性。
WELAI范式的应用前景广阔。在智能工厂、无人机中继网络、应急通信等场景中,WELAI都有望通过赋予AI与物理世界交互的能力,构建出真正自适应、高鲁棒性且可自主协同的下一代无线系统。
点击链接,加入这场无线技术范式变革!

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 25
25 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)