基于OpenCV C#的卡尺与距离测量工具源码(含强大视觉控件源码及测试图片)
基于Opencv C# 开发的圆卡尺、矩形卡尺,直线卡尺、距离测量工具源码,(送其他全部再卖项目)代码运行正常,由实际运行项目中剥离,含测试图片,包含一个强大的视觉控件源码,控件仿halcon,支持平移,无损缩放,显示各种自定义图形工具,鼠标拖动,简单方便。
一、工具集整体架构与技术栈
本次解析的机器视觉测量工具集,是一套以C#为开发语言、OpenCV为核心图像处理引擎的工业级视觉解决方案,依托OpenCVSharp实现C#与OpenCV的交互,基于Windows Forms构建可视化操作界面,共包含66个代码文件,涵盖模板匹配、多类型卡尺测量、距离计算、相机畸变矫正等核心功能模块。工具集采用“底层算法封装-中层逻辑调度-上层UI交互”的三层架构:底层通过ToolBox类封装OpenCV图像处理接口,实现图像读取、边缘检测、几何拟合等基础能力;中层通过模块化设计拆分各功能逻辑,确保代码可维护性与可扩展性;上层通过自定义U_DisPlay图像显示控件与TabControl分页布局,提供直观的操作与结果可视化界面。
从技术依赖来看,工具集目标框架为.NET Framework 4.8,引用OpenCvSharp、OpenCvSharp.Extensions等组件实现图像处理,通过PictureBoxEx控件增强图像显示交互,同时自定义CvDisplayGraphics系列类实现图形标注功能,整体技术栈贴合工业视觉开发需求,兼顾性能与易用性。
二、核心功能模块代码功能解析
(一)模板匹配模块:图像特征定位与多目标识别
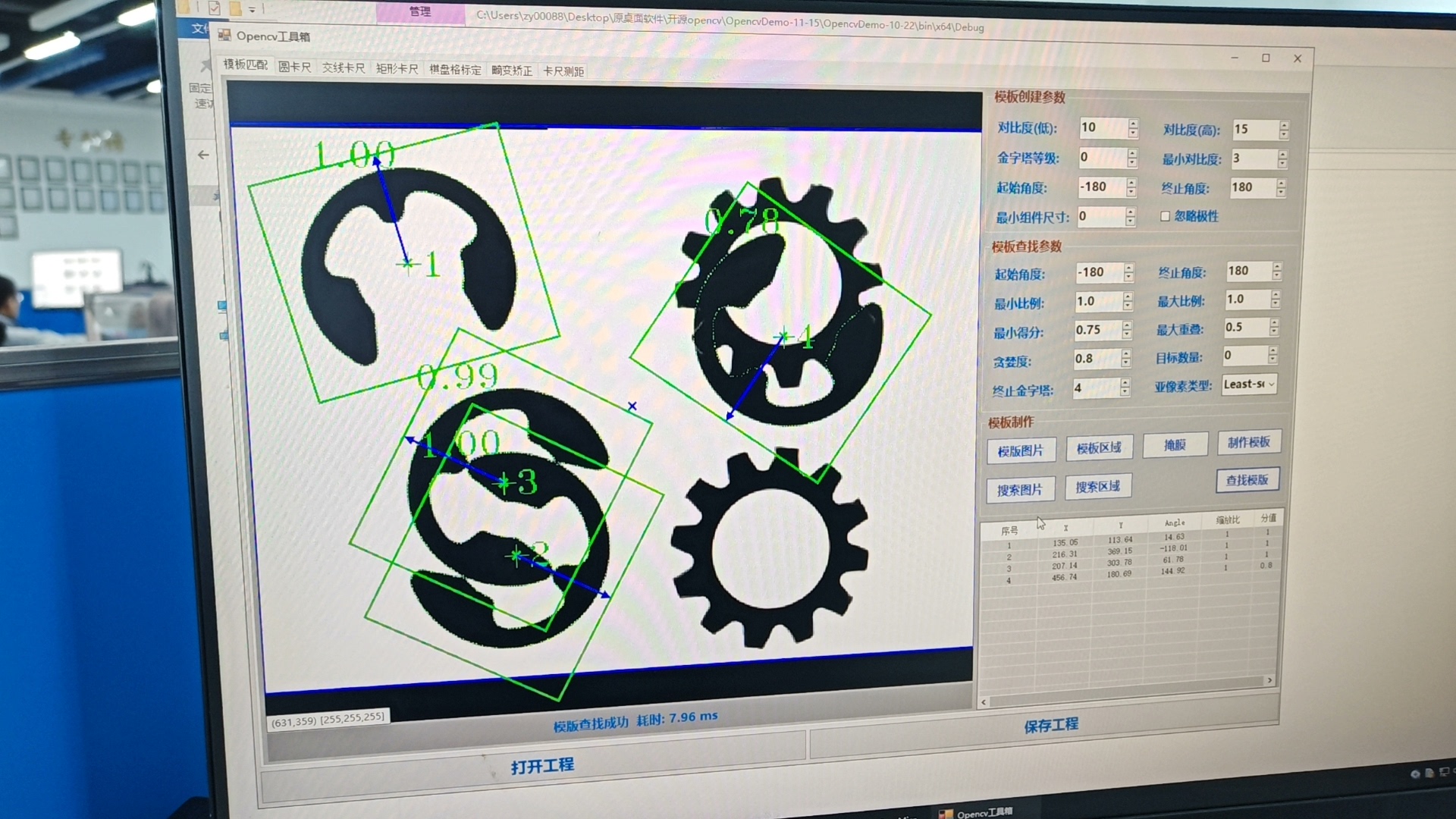
模板匹配模块是工具集的核心功能之一,通过Form1类中的btnOpenModelPic、btnMakeModel、btnFindModel等按钮事件,串联起“模板创建-目标搜索-结果输出”的完整流程,核心代码逻辑围绕模板特征提取与多尺度匹配展开。
1. 模板创建流程
- 图像加载与区域选择:通过
btnOpenModelPicClick事件调用OpenFileDialog加载模板图像,支持BMP、PNG等格式,图像以灰度模式读取(ImreadModes.Grayscale)并显示在uDisPlay1控件中。用户点击btnMakeRectClick可在图像上绘制模板区域(mtrainRoi),通过CvDisplayGraphicsRectangle1类实现矩形标注,支持拖动调整区域大小与位置,确保仅对感兴趣区域(ROI)进行特征提取。 - 参数配置与模板生成:在
groupBox1(模板创建参数)与groupBox2(模板查找参数)中,用户可配置对比度范围(numUDContrastLow/numUDContrastHigh)、金字塔等级(numUDCNumLevels)、角度范围(numUDCModelStartAngle/numUDCModelEndAngle)等参数。点击btnMakeModelClick后,代码调用mToolBox.CreateShapeModel方法,基于边缘检测算法提取模板特征,生成包含特征点、角度适应性的模板文件,同时在u_DisPlay1中用绿色点标注提取的特征点,直观展示模板质量。
2. 目标搜索与结果处理
- 搜索图像加载与区域设置:
btnOpenSearchPicClick事件加载待搜索图像,btnSearchRectClick可划定搜索区域(m_searchRoi),支持设置搜索区域占图像的90%(默认)或自定义调整,减少无关区域对匹配结果的干扰。 - 多条件匹配执行:点击
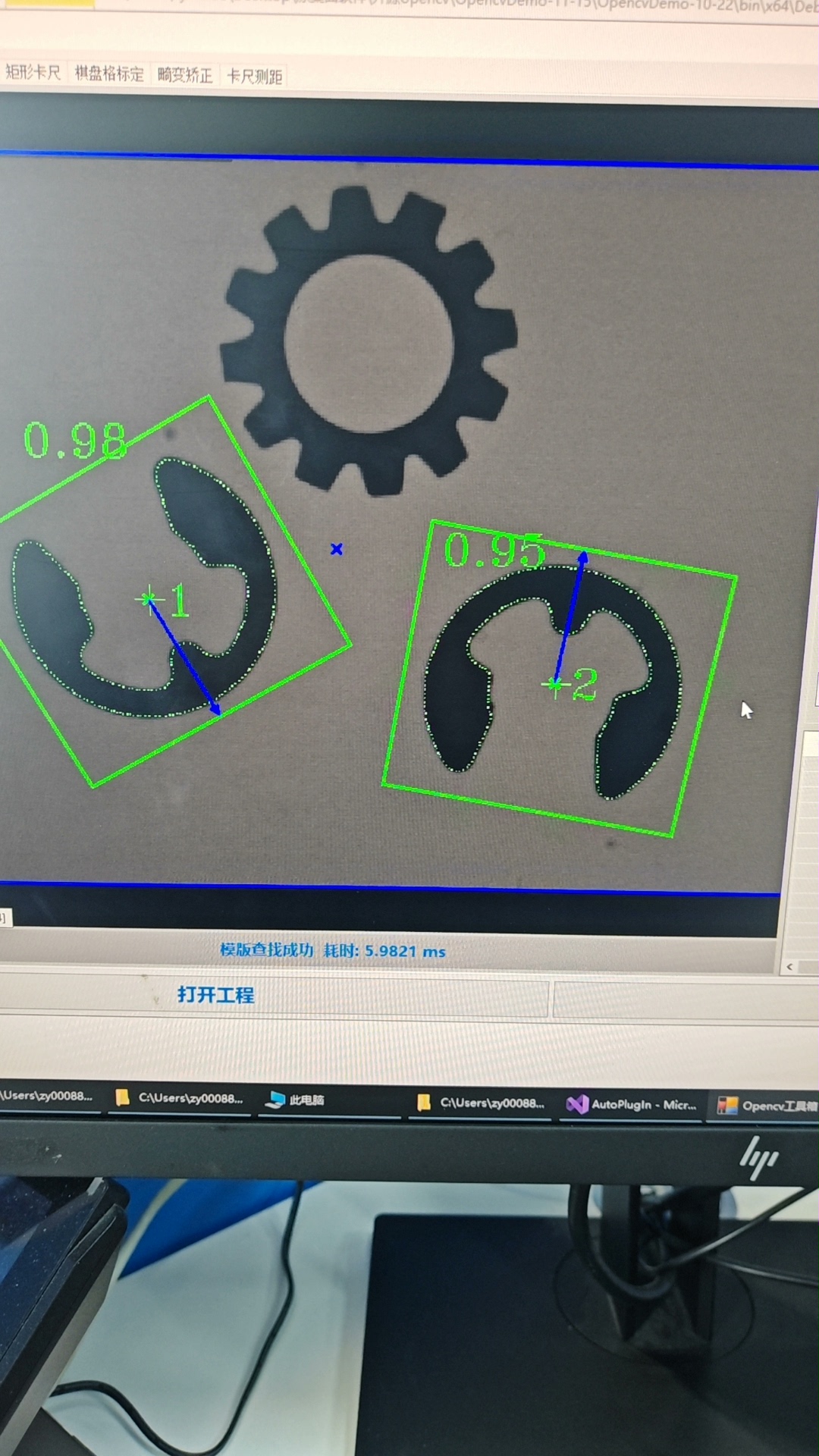
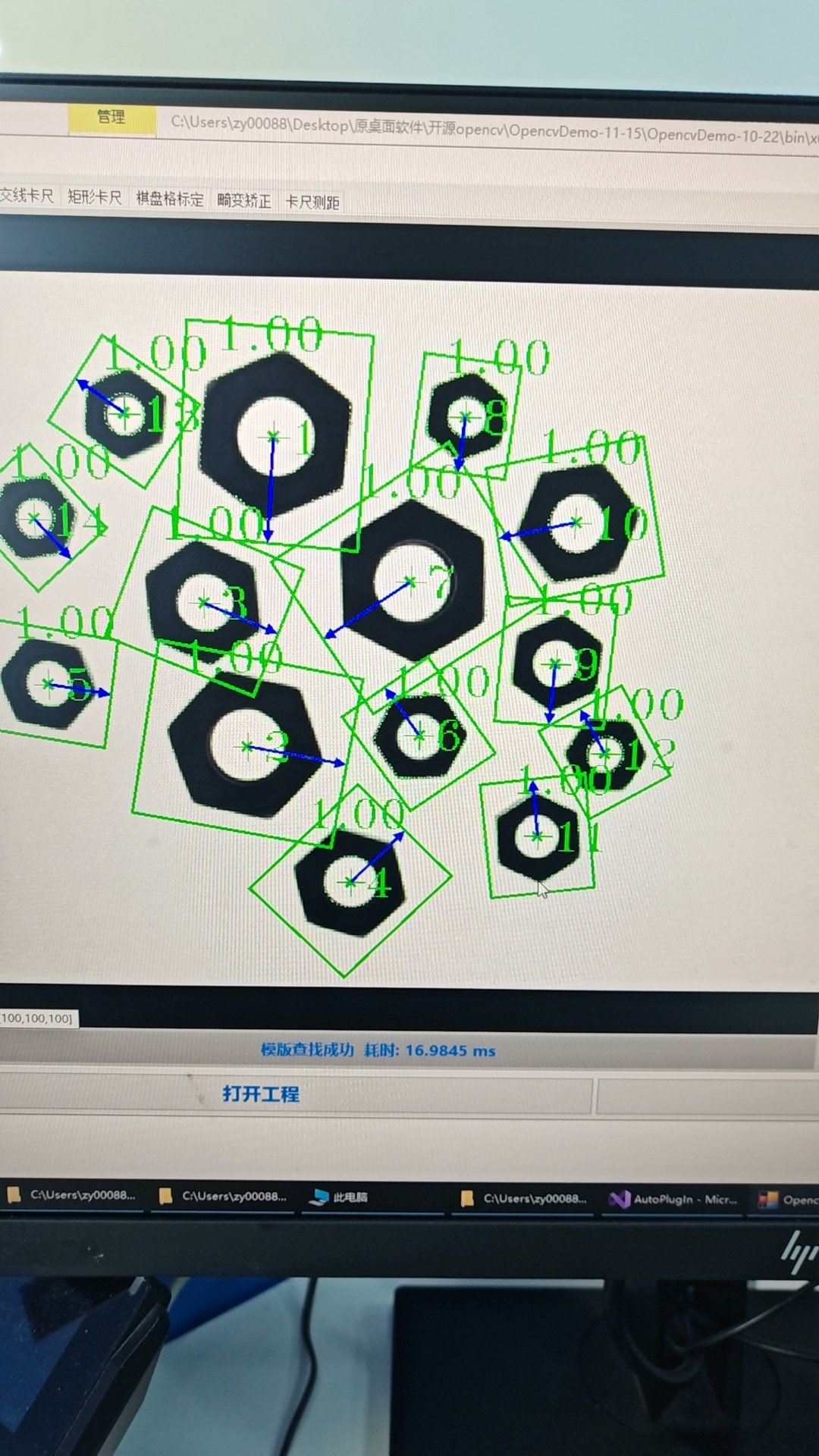
btnFindModelClick后,代码读取匹配参数(最小得分numUDFMinScore、缩放范围numUDFMinScale/numUDFMaxScale、最大重叠度numUDFMaxOverlap等),调用mToolBox.FindShapeModel方法执行匹配。该方法支持旋转(-180°~180°)、缩放(0.5~1.5倍)适应性匹配,通过亚像素拟合(comboSubPixel选择插值方式)提升定位精度,同时过滤低于最小得分的结果,避免误匹配。 - 结果可视化与输出:匹配成功后,代码在
listView1中展示结果列表,包含序号、目标X/Y坐标、角度、缩放比、得分等信息;在u_DisPlay1中用绿色矩形框标注目标位置,矩形大小根据缩放比自适应调整,同时显示匹配得分与序号。若匹配失败,lbShowMsg标签会以红色字体提示失败信息与耗时,便于问题排查。
3. 高级功能:掩膜与工程复用
- 掩膜操作:
btnMask_Click事件打开frmMask窗口,用户可通过橡皮擦工具擦除模板中无关区域(如背景干扰),生成掩膜图像。掩膜会参与模板创建过程,仅保留有效区域特征,提升复杂背景下的匹配精度。 - 工程文件管理:
btnSavePrjClick与btnOpenPrjClick事件支持保存/加载工程文件(.prj),工程文件包含模板参数、图像数据、掩膜信息等,加载后自动恢复所有配置与标注,避免重复操作,提升工作效率。
(二)卡尺测量模块:高精度几何特征提取与计算
卡尺测量模块包含圆卡尺、直线卡尺、矩形卡尺三个子模块,均基于“多卡尺边缘采集-几何拟合-异常点剔除”的核心逻辑,通过CvDisplayGraphicsCalipers系列类实现可视化操作,代码功能聚焦于边缘检测精度与拟合算法稳定性。
1. 圆卡尺:圆形特征测量
- 图像加载与卡尺配置:
btnCircleCallipersPicClick加载待测量图像,btnAddCircleCallipersClick在图像中心创建圆形卡尺(m_circleCaliper),用户可通过numUDCircleCalipersNum(卡尺数量)、numUDCircleCalipersLength(卡尺长度)、numUDCircleCalipersWidth(卡尺宽度)等参数调整卡尺规格,combCircleCalipersPolarity(搜索极性)与combCircleCalipersDir(搜索方向)设置边缘检测条件。 - 边缘采集与圆拟合:点击
btnFindCircleCallipers_Click后,代码遍历所有卡尺,采集每个卡尺路径上的灰度变化,通过边缘阈值(numUDCircleCalipersThreshold)筛选有效边缘点;调用FindCircle方法对边缘点进行圆拟合,同时通过ClearErrorPointCircle方法剔除异常点(数量由numUDCircleCalipersIgnoreDots设置),最终计算圆心X/Y坐标与半径。 - 结果展示:有效边缘点用绿色点标注(
dotsUseCircle),异常点用红色点标注(dotsErrCircle),拟合圆用绿色圆圈标注(findCircle),圆心坐标与半径实时显示在txtCircleCaliperX/txtCircleCaliperY/txtCircleCaliperR文本框中,支持手动复制结果用于后续分析。
2. 直线卡尺:直线与交线测量
- 双卡尺配置与参数设置:
btnLineCallipersPicClick加载图像,btnAddLine12CallipersClick添加两条直线卡尺(mline1Caliper/mline2Caliper),分别对应groupBox9与groupBox10参数区。用户可配置每条直线的卡尺数量(numUDLine1CalipersNum/numUDLine2CalipersNum)、允许偏差(numUDLine1CalipersMaxError/numUDLine2CalipersMaxError)等参数,支持独立调整以适应不同直线边缘特征。 - 直线拟合与交点计算:
btnFindCrossClick事件触发后,代码对每条直线卡尺采集的边缘点进行直线拟合(FitLine方法),通过getCrossPoint方法计算两条直线的交点;在uDisPlay3中用绿色点标注有效边缘点、绿色线段标注拟合直线、蓝色点标注交点,结果输出交点X/Y坐标(txtCrossX/txtCrossY)与直线角度(txtCrossA)。
3. 矩形卡尺:矩形特征定位
- 矩形卡尺创建与边缘采集:
btnRectCallipersPicClick加载图像,btnAddRectCallipersClick创建矩形卡尺(m_rectCaliper),卡尺自动覆盖矩形四条边区域。代码根据矩形边长比例自动分配每条边的卡尺数量(长边卡尺数量更多,确保边缘采集密度),通过numUDRectCalipersThreshold设置边缘检测阈值,numUDRectCalipersMaxError控制拟合允许偏差。 - 矩形拟合与结果输出:
btnFindRectCallipersClick事件中,代码对四条边分别进行直线拟合,通过求交得到矩形四个顶点,生成最小外接矩形并计算中心坐标与旋转角度;在uDisPlay4中用蓝色矩形标注拟合结果,中心坐标(txtRectCaliperX/txtRectCaliperY)与角度(txtRectCaliperA)实时更新,适用于矩形零件定位与角度测量场景。
(三)距离测量模块:两点间精准测距
距离测量模块基于卡尺边缘检测原理,聚焦于“起点-终点”两点间距离计算,代码功能围绕边缘定位精度与距离计算准确性展开。
1. 图像加载与卡尺配置
btnDistanceCallipersPicClick加载待测量图像,btnAddDistanceCallipersClick创建距离卡尺(m_distanceCaliper),用户可拖动卡尺端点调整测量路径;在groupBox16参数区配置边缘阈值(numUDDistanceCalipersThreshold)、滤波尺寸(numUDDistanceCalipersFiterSize),以及起点/终点的搜索模式(combStartCalipersSearchMode/combEndCalipersSearchMode)与搜索次序(combStartCalipersSearchNumber/combEndCalipersSearchNumber),支持选择“第1个边缘”“倒数1个边缘”等条件,适应不同测量需求。
2. 边缘定位与距离计算
点击btnGetDistanceClick后,代码沿卡尺路径采集灰度数据,通过滤波与边缘检测算法定位起点与终点坐标;调用距离公式计算两点间直线距离,在uDisPlay7中用蓝色线段标注测量路径(DisSeg),线段旁显示距离值;同时在groupBox18中输出起点X/Y(txtDistanceStartX/txtDistanceStartY)、终点X/Y(txtDistanceEndX/txtDistanceEndY)与距离值(txtDistance),支持毫米级精度测量。
(四)相机畸变矫正模块:图像精度预处理
相机畸变矫正模块通过棋盘格标定消除镜头畸变,代码功能涵盖角点检测、参数计算、畸变矫正三个核心环节,为后续高精度测量提供基础。
1. 棋盘格参数配置与角点检测
groupBox7参数区配置棋盘格参数:numUDCheckerBoardWidth/numUDCheckerBoardHeight设置内角点数量,numUDCheckerBoardDis设置方块实际间距(毫米),numUDCornerPixlSize设置角点检测窗口大小。点击btnCreateCheckBoardParam_Click后,代码加载多组畸变图像(默认读取“畸变图片”目录下14张图像),通过Cv2.FindChessboardCorners自动识别棋盘格角点,结合Cv2.CornerSubPix进行亚像素级优化,提升角点定位精度。
2. 标定参数计算与畸变矫正
代码基于角点坐标计算相机内参矩阵(mcameraMatrix)与畸变系数(mdistCoeffs),调用runCalibration方法完成标定;点击btnCheckCheckBoardParamClick后,加载待矫正图像,通过Cv2.Undistort应用标定参数进行畸变矫正,矫正后图像显示在uDisPlay6中,同时保存到“畸变图片”目录(命名为“ResX.jpg”),支持对比查看矫正前后效果,确保后续测量数据的准确性。
三、通用功能与交互设计
1. 自定义图像显示控件(U_DisPlay)
U_DisPlay类继承自PictureBox,是工具集的核心交互控件,代码功能涵盖图像显示、鼠标操作、图形标注三大模块:
- 图像显示模式:支持原始尺寸(Original)、自适应窗口(Fit)、全屏显示(Full)三种模式,通过
AutoDisplay属性切换,Fit模式可自动调整图像比例适配控件大小,避免拉伸变形; - 鼠标交互:支持滚轮缩放(每次缩放2倍)、左键拖动图像(仅在缩放后生效)、双击自适应窗口,鼠标悬停时显示像素坐标与灰度值(
toolTip1提示),便于精准定位; - 图形标注:集成
CvDisplayGraphicsShapeCollection集合,支持添加矩形、圆形、直线、点等图形,用于标注测量区域、结果等信息,图形颜色与可见性可通过代码动态控制。
2. 参数持久化与异常处理
- 参数持久化:除工程文件外,工具集通过
csBinaryReaderWriter/csXMLReaderWriter等类实现参数的二进制/XML格式读写,确保参数保存的安全性与兼容性; - 异常处理:核心功能代码均包含
try-catch块,如FindCircle、FitLine等方法捕获图像处理异常,通过MessageBox提示错误信息,同时记录耗时(DateTime.Now计算),便于性能优化与问题排查。
四、代码功能总结与应用场景
1. 功能特点
- 高精度:集成亚像素拟合、异常点剔除、畸变矫正技术,测量精度可达像素级,满足工业检测需求;
- 高灵活性:所有模块参数可配置,支持掩膜、多目标匹配、自定义卡尺区域等功能,适应复杂场景;
- 强可视化:实时展示边缘点、拟合结果、测量路径,结果直观易懂,降低操作门槛;
- 高可扩展性:模块化架构设计,新增测量功能(如椭圆卡尺)时仅需扩展
CvDisplayGraphicsCalipers类与核心算法方法,无需修改整体框架。
2. 应用场景
- 电子制造:PCB板零件定位、焊点间距测量、芯片引脚检测;
- 机械加工:轴承圆孔尺寸测量、齿轮齿距检测、矩形零件角度验证;
- 汽车行业:车身零件间隙测量、玻璃边缘检测、仪表盘部件定位;
- 医疗设备:注射器尺寸检测、手术器械精度验证、医疗耗材外观检测。
本工具集通过严谨的代码逻辑与丰富的功能设计,为机器视觉测量提供了完整解决方案,既可作为独立工具使用,也可基于核心模块二次开发,适配更多个性化需求。

中国智能体开发者社区,聚焦智能体与大模型开发,提供前沿资讯、实用工具链、开源项目及行业案例。通过技术沙龙、开发者大赛等活动,促进经验交流与协作,助力开发者快速构建创新智能应用。
更多推荐


 12
12 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)