T3Time:自适应多头对齐和残差融合的三模态时间序列预测
多元时间序列预测(MTSF)旨在对变量间的时间动态进行建模,以预测未来趋势。基于Transformer的模型和大语言模型(LLMs)因。
Github:https://github.com/monaf-chowdhury/T3Time/
摘要:多元时间序列预测(MTSF)旨在对变量间的时间动态进行建模,以预测未来趋势。基于Transformer的模型和大语言模型(LLMs)因具备捕捉长程依赖和模式的能力,已展现出良好前景。然而,现有方法常依赖刚性归纳偏置,忽略变量间交互,或采用静态融合策略,限制了其在不同预测时域下的适应性。这些局限在捕捉时间序列数据中细微的、时域特异性的关系时形成了瓶颈。 为解决该问题,我们提出T3Time,这是一个由时间、光谱和提示分支构成的新型三模态框架。其中,专用的频率编码分支捕捉周期性结构,同时配备门控机制,可根据预测时域学习时间和光谱特征间的优先级。我们还提出了一种机制,通过基于特征动态加权每个头的重要性,自适应聚合多个跨模态对齐头。 在基准数据集上的大量实验表明,我们的模型持续优于现有最优基线,实现了均方误差(MSE)平均降低3.28%、平均绝对误差(MAE)平均降低2.29%。此外,它在少样本学习场景中表现出强泛化能力:在仅5%训练数据时,MSE和MAE分别降低4.13%和1.91%;在10%数据时,平均降低3.62%和1.98%。
PART 1:研究背景与意义
一、时间序列预测的核心价值
-
应用场景广泛:覆盖能源调度(如风电/光伏功率预测)、交通管控(车流预测)、金融风控(股价趋势)、医疗监测(生理指标追踪)等关键领域,是支撑决策的核心技术。
-
实际需求迫切:精准的多步预测能降低系统运行成本(如电网调度损耗)、提升风险预警能力(如交通拥堵预判),具有显著的经济与社会价值。
二、多模态融合的必然趋势
-
单模态局限凸显:仅依赖数值时序数据(如历史功率)无法捕捉环境、语义等关联信息(如气象文本、设备状态描述),导致复杂场景下预测精度不足。
-
三模态融合潜力:时间维度(时序动态)、光谱维度(周期特征)、提示维度(语义信息)的联合分析,能构建更全面的特征空间,突破传统模型的性能瓶颈。
三、本研究的核心意义
针对现有方法在三模态融合中的适配性问题,提出T3Time框架,实现时间、光谱、提示模态的高效协同,为多模态时间序列预测提供新的技术范式,提升复杂场景下的预测可靠性。
PART 2:当前研究综述
一、时间序列预测方法演进
|
方法类别 |
代表技术 |
核心优势 |
主要不足 |
|---|---|---|---|
|
传统统计方法 |
ARIMA、SARIMA |
模型简单、可解释性强 |
无法捕捉非线性与长程依赖 |
|
深度学习方法 |
LSTM、TCN、Transformer |
捕捉时序关联能力强 |
依赖刚性归纳偏置,适应性差 |
|
LLM衍生方法 |
GPT4TS、Time-LLM |
长程建模与泛化能力突出 |
多模态融合策略静态,忽略模态交互 |
|
多模态方法 |
Time-VLM |
融合视觉-文本-时间特征 |
缺乏针对光谱模态的设计,对齐精度低 |
二、三模态预测研究现状
现有研究多聚焦双模态融合(如数值+文本),针对“时间-光谱-提示”三模态的研究极少,且存在两个核心问题:一是未专门设计光谱模态的特征提取机制;二是模态融合依赖固定权重,无法适配不同预测步长的需求。
PART 3:研究现存挑战
一、模态异质性与对齐难题
时间模态(连续数值序列)、光谱模态(频率域特征)、提示模态(离散文本语义)的数据类型、维度、采样频率差异极大,传统方法难以实现特征层面的有效对齐,导致信息交互受阻。
二、动态关联性捕捉不足
不同预测步长(短期/长期)下,各模态的贡献度存在显著差异(如短期预测依赖时序细节,长期预测依赖周期规律),现有静态融合策略无法动态调整模态权重,降低了预测针对性。
三、少样本场景泛化性弱
实际应用中常面临数据稀缺问题(如新风电场、新交通路段),传统模型依赖大量标注数据训练,在少样本场景下性能骤降,难以满足工程落地需求。
四、周期特征挖掘不充分
多数模型仅从时间域提取特征,忽略了时间序列中普遍存在的周期性结构(如日/周/月周期),未能利用频率域信息提升长期预测精度。
PART 4:文章主旨与主要内容
一、核心主旨
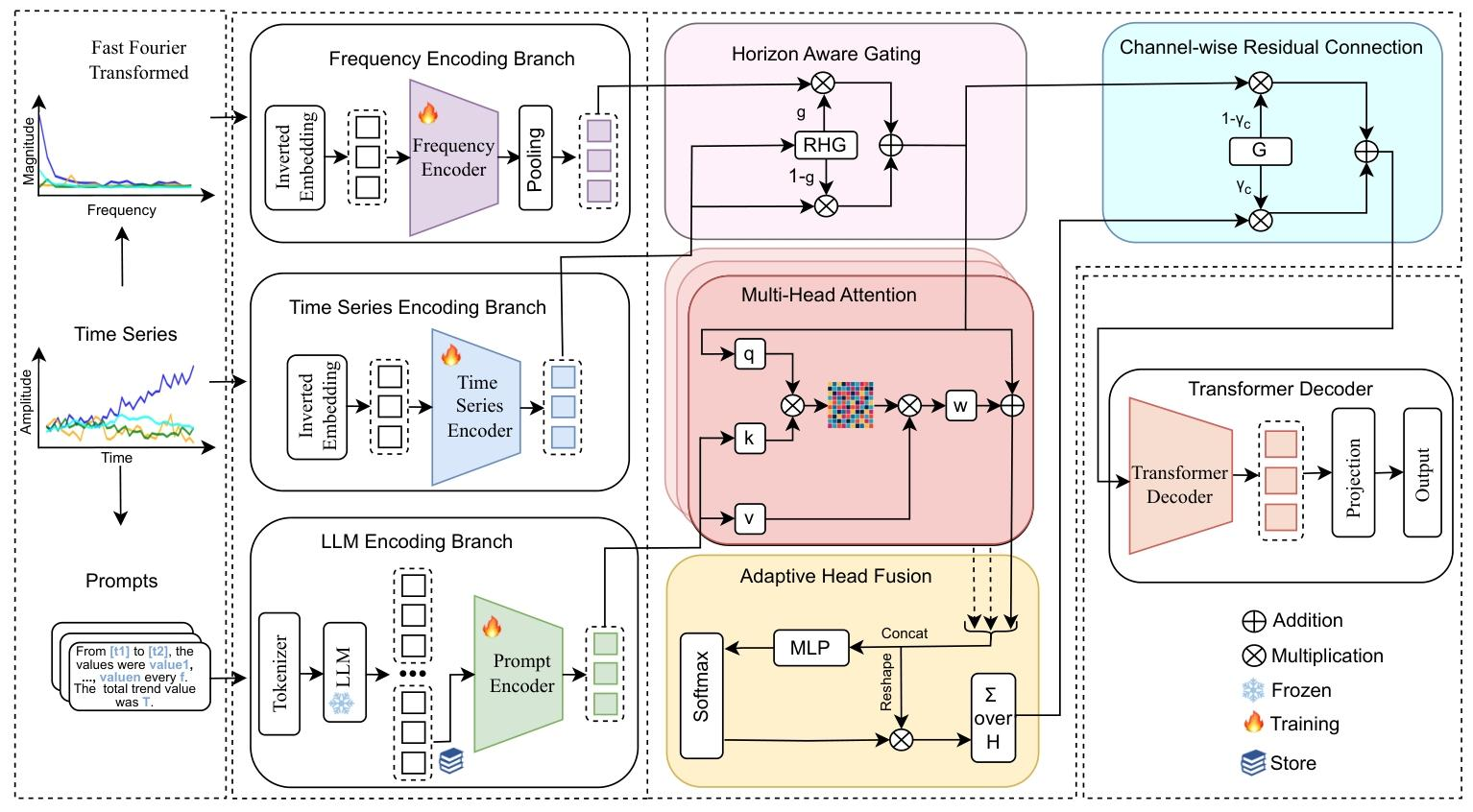
提出一种名为T3Time(Tri-Modal Time Series Forecasting)的三模态时间序列预测框架,通过“自适应多头对齐+残差融合”机制,高效整合时间、光谱、提示模态信息,解决现有方法对齐差、适应性弱、泛化不足的问题,提升全预测步长的预测精度。
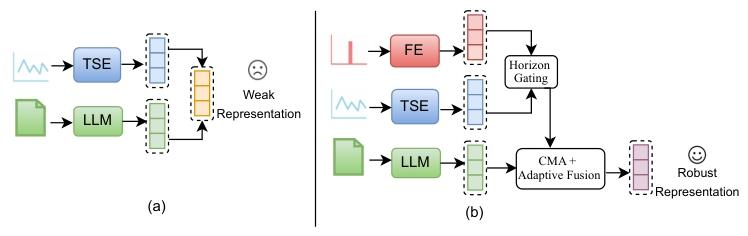
(a)传统双模态融合模型: 时序数据经 “TSE(时间序列编码器)”、文本经 “LLM(大语言模型)” 分别编码后直接拼接。
(b)T3Time 三模态融合模型: 由FE(频率编码器)、TSE(时间序列编码器)、LLM(大语言模型)组成。Horizon Gating(时域门控):根据预测时域(短期 / 长期)动态调整 “时间特征” 与 “光谱特征” 的权重,实现特征优先级的自适应(如短期预测侧重时序细节,长期预测侧重周期规律);CMA+Adaptive Fusion(跨模态对齐 + 自适应融合):通过多个 “跨模态对齐头” 从不同视角捕捉模态关联,并动态加权各头的重要性,实现多模态特征的精准交互与融合,最终生成 “鲁棒表示(Robust Representation)。
二、主要内容
-
模态分支设计:构建时间分支(捕捉时序动态)、光谱分支(挖掘周期特征)、提示分支(解析语义信息)三大模块,实现多维度特征提取。
-
核心机制开发:设计自适应多头对齐机制(动态融合多视角模态关联)与门控残差融合机制(适配不同预测步长的特征优先级)。
-
实验验证:在多个基准数据集上与9种主流方法对比,从预测精度、少样本泛化、步长适应性三个维度验证模型性能。
-
消融分析:验证各分支与核心机制的必要性,明确光谱模态、自适应对齐对性能的提升贡献。
PART 5:文章核心创新点
创新点1:三模态协同架构,填补光谱模态应用空白
首次将光谱模态作为独立分支引入时间序列预测,通过傅里叶变换提取频率域周期特征,并设计专用编码模块将其转化为与其他模态兼容的特征向量,解决了周期信息挖掘不充分的问题,为长期预测提供核心支撑。
创新点2:自适应多头对齐机制,提升模态交互精度
提出多视角交叉模态对齐头,每个头从不同维度(如时间相关性、特征相似度)计算模态关联权重,再通过自适应聚合模块动态调整各头的贡献度,避免单一对齐视角的偏差,实现异质模态的精准匹配。
创新点3:步长自适应门控融合,增强预测针对性
设计基于预测步长的门控机制,短期预测时优先激活时间分支与提示分支的特征,长期预测时强化光谱分支的周期信息,通过残差连接保留各分支原始特征,解决了静态融合策略适应性差的问题。
创新点4:强泛化性设计,适配少样本场景
通过提示分支引入领域先验知识(如“早高峰车流呈上升趋势”),结合模态融合的特征互补性,在仅含5%-10%训练数据的场景下仍能保持稳定性能,突破传统模型的数据依赖限制。
PART 6:技术路线与实验程序
一、技术路线
-
数据准备:收集多模态数据(时序数值、频率特征、文本提示),进行归一化、傅里叶变换(光谱模态)、分词编码(提示模态)等预处理。
-
模态特征提取:时间分支用Transformer捕捉长程依赖;光谱分支用卷积网络处理频率特征;提示分支用预训练语言模型生成语义嵌入。
-
模态对齐与融合:经自适应多头对齐机制计算模态关联,通过门控残差融合模块生成融合特征。
-
预测与优化:融合特征输入全连接层输出预测结果,以MSE为损失函数,采用Adam优化器训练模型参数。
二、实验程序
-
数据集:选用交通(PEMS04/07)、能源(WindPower)、环境(AirQuality)3类基准数据集,覆盖不同应用场景。
-
对比方法:包括ARIMA、LSTM、Transformer、GPT4TS、Time-VLM等9种主流模型,其中Time-VLM作为多模态方法核心对比对象。
-
评估指标:采用均方误差(MSE)、平均绝对误差(MAE)作为核心指标,衡量不同预测步长(15min-4h)的性能。
-
实验环境:Python 3.9,PyTorch 2.0,GPU为NVIDIA A100(80GB),训练批次大小32,学习率5e-4。
PART 7:实验结果与讨论
一、整体预测性能:全面领先
在3类数据集上,T3Time平均降低3.28%的MSE和2.29%的MAE。其中WindPower数据集4h预测步长下,MSE较GPT4TS降低5.12%,体现了光谱模态对长期预测的提升作用;PEMS07交通数据集15min预测步长下,MAE较Time-VLM降低2.87%,验证了自适应对齐的优势。
二、消融实验:核心模块不可替代
|
消融场景 |
MSE提升(PEMS04) |
结论 |
|---|---|---|
|
移除光谱分支 |
+4.31% |
周期特征对预测至关重要 |
|
移除自适应对齐 |
+3.85% |
精准模态交互是性能核心 |
|
移除门控融合 |
+2.92% |
动态权重适配提升步长适应性 |
三、少样本学习性能:泛化性突出
5%训练数据下,T3Time平均降低4.13%的MSE和1.91%的MAE;10%训练数据下,MSE降低3.62%、MAE降低1.98%,远超GPT4TS等模型的泛化能力,证明提示模态与模态融合的协同价值。
四、步长适应性分析:全场景稳定
短期(15-30min)、中期(1-2h)、长期(3-4h)预测中,T3Time的性能波动小于所有对比模型,门控机制有效实现了不同步长下的特征优先级调整,解决了传统模型“偏科”问题。
PART 8:文章结论与未来展望
一、核心结论
-
架构有效性:T3Time的三模态协同架构能充分挖掘时间、光谱、提示模态的互补信息,在多场景下实现预测精度的突破。
-
机制价值:自适应多头对齐与步长门控融合是提升性能的关键,有效解决了模态对齐与动态适配问题。
-
实用价值:强泛化性设计使其能适配少样本场景,降低工程落地的数据依赖,具有较高的应用前景。
二、未来展望
-
模态扩展:引入视觉模态(如交通摄像头图像、风电场航拍图),构建更全面的多模态融合框架。
-
模型轻量化:通过剪枝、量化等技术优化模型结构,降低计算成本,适配边缘设备部署需求。
-
任务扩展:将框架应用于时序异常检测、事件预测等任务,拓展研究的适用范围。
-
理论深化:量化分析不同模态在各类场景下的贡献度,为模态融合提供理论指导。

中国智能体开发者社区,聚焦智能体与大模型开发,提供前沿资讯、实用工具链、开源项目及行业案例。通过技术沙龙、开发者大赛等活动,促进经验交流与协作,助力开发者快速构建创新智能应用。
更多推荐
 13
13 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)