4 IMU在ROS2中的使用
全面介绍ROS(Robot Operating System)的使用,包括基础概念、安装配置、编程技巧以及在机器人开发中的实际应用。通过本课程的学习,学生将掌握基于ROS的机器人软件开发能力,并能够利用ROS进行机器人的感知、决策和控制。
IMU在ROS2中的使用
实验介绍
IMU(Inertial Measurement Unit,惯性测量单元)是一种用于测量和感知物体运动状态的传感器装置。它通常由多个惯性传感器组成,包括加速度计、陀螺仪和磁强计,用于测量宿主载体在空间中的加速度、角速度和磁场强度等参数。
IMU 被广泛应用于机器人领域,包括无人机、自动驾驶汽车、机器人手臂、人体运动追踪系统等。它能为机器人提供实时而精确的运动参数,使机器人能够感知自身的运动姿态,并做出相应的反应和决策。
实验过程
IMU数据获取
IMU数据的获取是通过订阅IMU节点发布的话题,从话题中获取IMU节点发出的消息包来实现的,如下图所示。
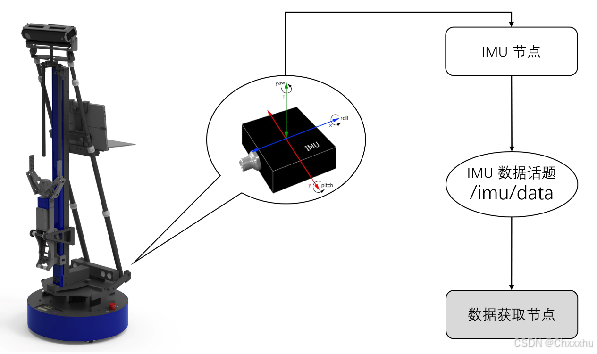
下面将实现一个订阅者节点订阅“/imu/data”话题,从此话题中接收 sensor_msgs::lmu类型的消息包,并解析出机器人的滚转、俯仰和航向角等姿态数据。
编写 IMU 数据获取程序
首先在工作空间中创建一个软件包。打开一个新的终端窗口,输入如下指令,进入工作空间。
cd ~/ros2_ws/src
然后用如下指令创建一个名为“imu_pkg”的软件包
ros2 pkg create imu_pkg
创建好软件包后,接下来在这个软件包中创建一个节点,具体操作步骤如下
1.编写节点代码
先创建这个节点的源码文件。在VSCode中找到[imu_pkg]软件包,用鼠标石健单击它的[src]子目录,在弹出的快捷菜单中选择「新建文件]。此时会提示输人文件名,输入“imu_data.cpp”,然后按[Enter]键创建文件。
下面编写这个源码文件,其内容如下。
#include <rclcpp/rclcpp.hpp>
#include <sensor_msgs/msg/imu.hpp>
#include <tf2/LinearMath/Quaternion.h>
#include <tf2/LinearMath/Matrix3x3.h>
std::shared_ptr<rclcpp::Node> node;
void IMUCallback(const sensor_msgs::msg::Imu::SharedPtr msg)
{
tf2::Quaternion tf2_quaternion;
tf2_quaternion.setX(msg->orientation.x);
tf2_quaternion.setY(msg->orientation.y);
tf2_quaternion.setZ(msg->orientation.z);
tf2_quaternion.setW(msg->orientation.w);
tf2::Matrix3x3 matrix(tf2_quaternion);
double roll, pitch, yaw;
matrix.getRPY(roll, pitch, yaw);
roll = roll * 180 / M_PI;
pitch = pitch * 180 / M_PI;
yaw = yaw * 180 / M_PI;
RCLCPP_INFO(node->get_logger(), "roll= %.0f pitch= %.0f yaw= %.0f", roll, pitch, yaw);
}
int main(int argc, char** argv)
{
rclcpp::init(argc, argv);
node = std::make_shared<rclcpp::Node>("imu_data_node");
auto sub = node->create_subscription<sensor_msgs::msg::Imu>("/imu", 10, IMUCallback);
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
上述代码可以从 wpr_simulation2的例程文件中找到。若编译报错,可以与 wpr_simulation2\demo_cpp\6_imu_data.cpp 文件中的代码进行对比。
2.设置编译规则
节点源码的编译规则写在imu_pkg的CMakeLists.txt文件里。在 VSCode 中打开这个文件,在这个文件里添加节点的编译规则。首先使用如下代码寻找节点代码中用到的依赖项。
find_package(rclcpp REQUIRED)
find_package(sensor_msgs REQUIRED)
find_package(tf2 REQUIRED)
然后使用如下代码添加节点源码的编译规则
add_executable(imu_data src/imu_data.cpp)
ament_target_dependencies(imu_data "rclcpp" "sensor_msgs" "tf2")
最后使用如下代码添加节点编译完成后的安装规则
install(TARGETS imu_data
DESTINATION lib/${PROJECT_NAME})
这些内容可以从 wpr_simulation2的例程文件中找到。如果编译报错,可以与 wpr_simulation2\demo_cmakelists\6_imu_data.txt 文件中的代码进行比对。
上述规则添加完毕后,一定要保存文件,否则规则无法生效。
3.修改软件包信息
在 VSCode 中打开[imu_pkg]下的[package.xml]文件,使用如下代码添加依赖项
<depend>rclcpp</depend>
<depend>sensor_msgs</depend>
<depend>tf2</depend>
这些内容可以从 wpr_ simulation2 的例程文件中找到。如果编译报错,可以与 wpr_simulation2\demo_package\6_imu_data.xml 文件中的代码进行比对。
文件修改后,一定要保存文件,否则新的包信息无法生效
4.编译软件包
修改完上述文件后,打开终端窗口,执行如下指令,进入工作空间。
cd ~/ros2_ws
然后执行如下指令,对工作空间里的所有软件包进行编译
colcon build
仿真运行 IMU 数据获取程序
下面运行刚才编写的节点。在运行前,确认已经按照之前下载了wpr_simulation2 仿真项目。然后,加载当前工作空间中的环境设置,这样ros2指令才能找到刚才编译后的软件包和节点文件。保持终端的当前路径依然在工作空间目录ros2_ws中,然后执行如下指令。
source install/setup.bash
然后,先启动带有机器人的仿真环境。
ros2 launch wpr_simulation2 wpb_simple.launch.py
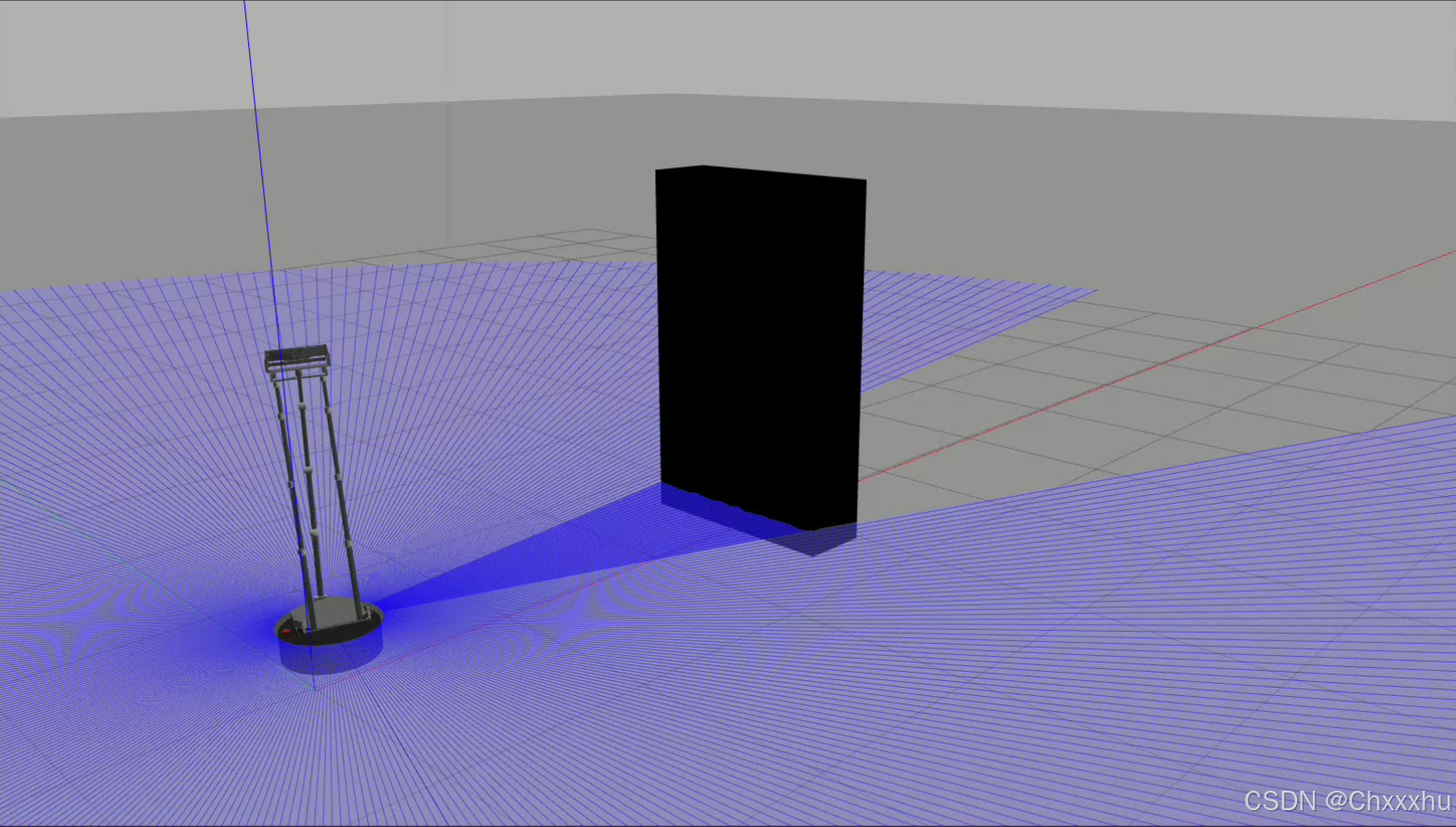
这时会启动一个仿真窗口,里面有一台仿真机器人,面对一个书柜。接下来运行刚才编写的节点imu_data。在 Terminator 终端中按组合键[Ctrl+shift+O],将终端分为上、下两个子窗口。
在新的终端窗口中执行如下指令,加载新的工作空间环境设置
source install/setup.bash
然后使用如下指令运行刚才编写的节点,
ros2 run imu_pkg imu_data
下面通过改变机器人的姿态来观察节点获取的数值是否会跟着变化。切换到仿真环境单击工具栏中的[旋转]按钮。

然后选中仿真环境中的机器人模型,这时机器人周围会出现正交的3个颜色的圆环,分别可以改变机器人的X轴、Y轴、Z轴3个轴向上的姿态角度。
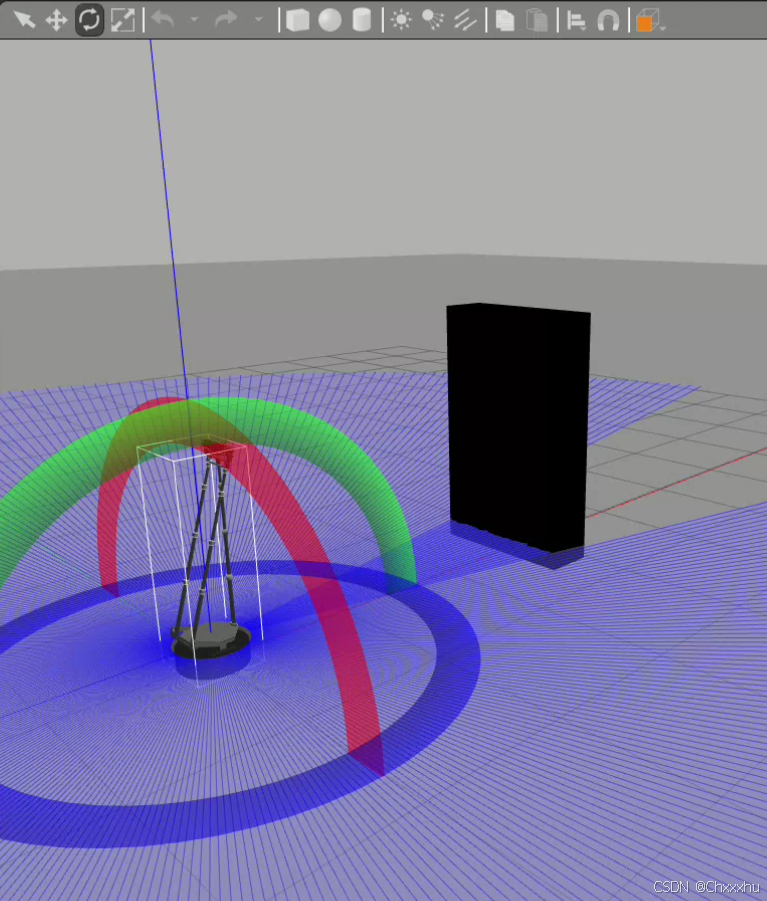
将指针移动到水平旋转的圆环上,将机器人原地旋转一个角度
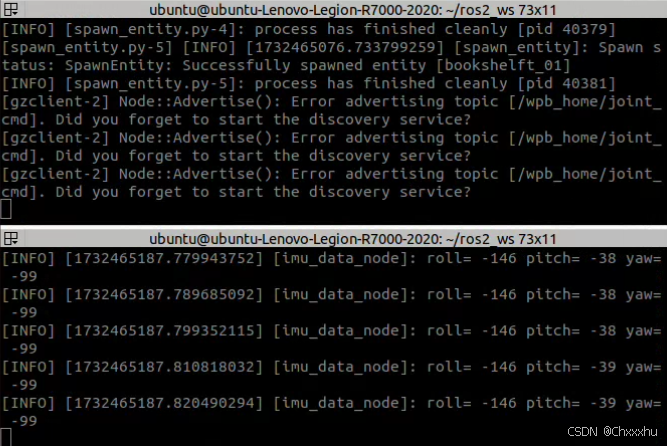
这时切换到终端窗口,以看到,机器人的航向角 yaw的值发生了相应的变化,IMU 数据获取实验成功。
基于IMU的航向锁定实现
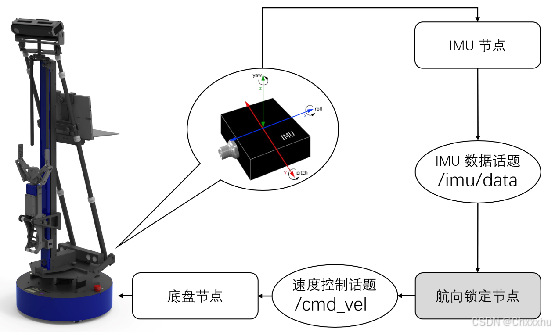
下面将在前一个实验的基础上,实现一个航向锁定的功能。编写一个节点,先订阅“/imw/data”话题,从此话题中接收IMU 节点发来的 sensor_msgs::Imu 类型消息包,解析出机器人的姿态角度。设置一个目标航向角度,让机器人朝着这个航向运动。若运行过程中机器人的姿态被改变了,导致航向角与目标角度不一致,则根据航向角偏差值,计算出纠速度值,打包成geometry_msgs::Twist 类型的消息包,发布到“/cmd_vel”话题中。机器人底盘节点会从“/cmd_vel”话题中获取速度值并执行,以此来实现航向锁定的行为
编写航向锁定程序
按照上一个实验,在工作空间中创建一个imu_pkg软件包。如果已经创建好了,可以直接使用,不用重复创建。具体操作步骤如下。
1.编写节点代码
先创建这个节点的源码文件。在VSCode 中找到[imu_pkg]软件包用鼠标右键单击它的[src]子目录,在弹出的快捷菜单中选择[新建文件]。此时会提示输入文件名,输入“imu_behavior.cpp”,然后按[Enter]键创建文件。
下面编写这个源码文件,其内容如下。
#include <rclcpp/rclcpp.hpp>
#include <sensor_msgs/msg/imu.hpp>
#include <geometry_msgs/msg/twist.hpp>
#include <tf2/LinearMath/Quaternion.h>
#include <tf2/LinearMath/Matrix3x3.h>
std::shared_ptr<rclcpp::Node> node;
rclcpp::Publisher<geometry_msgs::msg::Twist>::SharedPtr vel_pub;
void IMUCallback(const sensor_msgs::msg::Imu::SharedPtr msg)
{
tf2::Quaternion tf2_quaternion;
tf2_quaternion.setX(msg->orientation.x);
tf2_quaternion.setY(msg->orientation.y);
tf2_quaternion.setZ(msg->orientation.z);
tf2_quaternion.setW(msg->orientation.w);
tf2::Matrix3x3 matrix(tf2_quaternion);
double roll, pitch, yaw;
matrix.getRPY(roll, pitch, yaw);
roll = roll * 180 / M_PI;
pitch = pitch * 180 / M_PI;
yaw = yaw * 180 / M_PI;
RCLCPP_INFO(node->get_logger(), "roll= %.0f pitch= %.0f yaw= %.0f", roll, pitch, yaw);
double target_yaw = 90;
geometry_msgs::msg::Twist vel_msg;
double diff_angle = target_yaw - yaw;
vel_msg.angular.z = diff_angle * 0.01;
vel_msg.linear.x = 0.1;
vel_pub->publish(vel_msg);
}
int main(int argc, char** argv)
{
rclcpp::init(argc, argv);
node = rclcpp::Node::make_shared("imu_behavior_node");
auto sub = node->create_subscription<sensor_msgs::msg::Imu>("imu", 10, IMUCallback);
vel_pub = node->create_publisher<geometry_msgs::msg::Twist>("/cmd_vel", 10);
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
代码编写完毕后,需要保存代码。保存成功后,编辑界面文件名后面的圆点符号会变成个一叉符号。
2.设置编译规则
节点源码的编译规则写在imu_pkg的CMakeLists.txt 文件里。在 VSCode 中打开这个文件,在这个文件里添加节点的编译规则。首先使用如下代码寻找节点代码中用到的依赖项。
find_package(rclcpp REQUIRED)
find_package(sensor_msgs REQUIRED)
find_package(tf2 REQUIRED)
find_package(geometry_msgs REQUIRED)
然后使用如下代码添加节点源码的编译规则
add_executable(imu_behavior src/imu_behavior.cpp)
ament_target_dependencies(imu_behavior "rclcpp" "sensor_msgs" "tf2" "geometry_msgs")
最后使用如下代码在安装规则里添加新的节点
install(TARGETS imu_data imu_behavior
DESTINATION lib/${PROJECT_NAME})
这些内容可以从 wpr- simulation2 的例程文件中找到。如果编译报错,可以与 wpr_simulation2\demo_cmakelists\6_imu_behavior. txt 文件中的代码进行比对。
上述规则添加完毕后,一定要保存文件,否则规则无法生效。
3.修改软件包信息
在VSCode 中打开[imu_pkg]下的[package.xml]文件,使用如下代码添加依赖项信息
<depend>rclcpp</depend>
<depend>sensor_msgs</depend>
<depend>tf2</depend>
<depend>geometry_msgs</depend>
这些内容可以从 wpr_simulation2 的例程文件中找到。如果编译报错,可以与 wpr_simulation2\demo_package\6_imu_behavior.xml 文件中的代码进行比对。
如果之前已经添加过了,可以不必重复添加。文件修改后,一定要保存文件,否则新的包信息无法生效。
4.编译软件包
修改完上述文件后,打开终端窗口。执行如下指令,进入工作空间
cd ~/ros2_ws
然后执行如下指令,对工作空间中的所有软件包进行编译,
colcon build
仿真运行航向锁定程序
面运行刚才编写的节点。在运行前,确认已经按照之前下载了wpr_simulation2 仿真项目。然后,加载当前工作空间中的环境设置,这样ros2指令才能找到刚才编译后的软件包和节点文件。保持终端的当前路径依然在工作空间目录ros2_ws中,然后执行如下指令。
source install/setup.bash
然后,先启动带有机器人的仿真环境。执行如下指令。
ros2 launch wpr_simulation2 wpb_simple.launch.py
这时会启动一个仿真窗口,里面有一台仿真机器人,面对一个书柜
接下来运行刚才编写的节点。在Terminator 终端中按组合键[Ctrl+Shift+O],将终端分为上、下两个子窗口。
在新的终端窗口中加载新的工作空间环境设置
source install/setup.bash
然后使用如下指令运行刚才编写的节点
ros2 run imu_pkg imu_behavior
节点运行起来之后,切换到刚才的仿真窗口。如下图所示,可以看到机器人一边旋转,一边向着左侧 90°的方向移动。当转到面向左侧方向时,机器人不再转动,变成直行。
这时尝试改变机器人的航向,单击仿真窗口工具栏中的[旋转]按钮。然后选中仿真环境中的机器人模型,这时机器人周围会出现正交
的3个颜色的圆环,分别可以改变机器人的X轴、Y轴、Z轴3个轴向上的姿态角度
将指针移动到水平旋转的圆环上,将机器人旋转一个角度
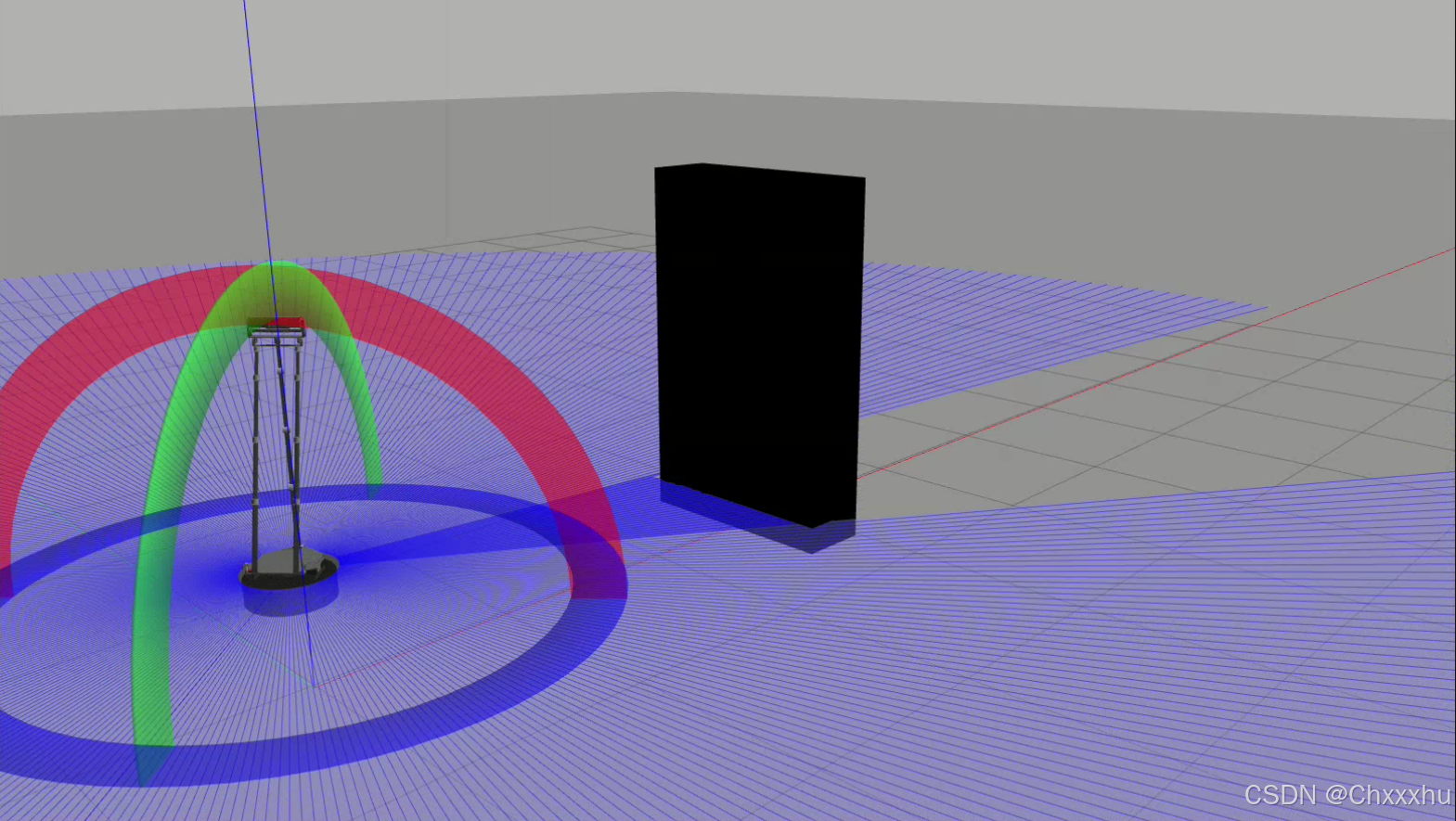
机器人姿态发生改变后,它会立刻调整自己的朝向,再次转向90°航向的方向。这相当于机器人已经锁定 90°方向为自己的目标航向,航向锁定功能成功实现。
实验总结
在本次实验中,我们成功实现了IMU(惯性测量单元)在ROS2中的应用,具体包括IMU数据的获取和基于IMU的航向锁定功能。
我们创建了一个名为imu_data_node的ROS2节点,该节点订阅了/imu/data话题,接收sensor_msgs::msg::Imu类型的消息包。通过解析IMU数据,提取了机器人的滚转角(roll)、俯仰角(pitch)和航向角(yaw),并将这些角度转换为度数后打印出来。实验验证了IMU数据的正确性和实时性,确保了后续控制逻辑的基础数据准确性。
在原有的imu_pkg软件包基础上,我们新增了一个节点imu_behavior_node。该节点不仅订阅了/imu话题获取IMU数据,还发布了geometry_msgs::msg::Twist类型的消息到/cmd_vel话题,用于控制机器人的线速度和角速度。我们设置了目标航向角为90度,并根据当前航向角与目标航向角之间的差异计算出需要调整的角度,进而控制机器人的转向。实验结果显示,机器人能够在遇到外部干扰导致航向偏移时,自动调整方向回到设定的目标航向上,实现了航向锁定功能。
通过运行仿真环境wpr_simulation2,我们在仿真环境中观察到机器人能够实时显示其姿态数据,并且在手动改变机器人的姿态后,节点能够准确地检测到姿态变化并进行相应的调整。航向锁定功能的测试表明,机器人能够稳定地维持在目标航向90度,即使受到外部干扰也能迅速恢复到目标航向上,证明了算法的有效性和鲁棒性。
不仅订阅了/imu话题获取IMU数据,还发布了geometry_msgs::msg::Twist类型的消息到/cmd_vel话题,用于控制机器人的线速度和角速度。我们设置了目标航向角为90度,并根据当前航向角与目标航向角之间的差异计算出需要调整的角度,进而控制机器人的转向。实验结果显示,机器人能够在遇到外部干扰导致航向偏移时,自动调整方向回到设定的目标航向上,实现了航向锁定功能。
通过运行仿真环境wpr_simulation2,我们在仿真环境中观察到机器人能够实时显示其姿态数据,并且在手动改变机器人的姿态后,节点能够准确地检测到姿态变化并进行相应的调整。航向锁定功能的测试表明,机器人能够稳定地维持在目标航向90度,即使受到外部干扰也能迅速恢复到目标航向上,证明了算法的有效性和鲁棒性。
我们使用了tf2库进行四元数到欧拉角的转换,确保了姿态数据的准确解析。通过geometry_msgs::msg::Twist消息类型控制机器人的运动,实现了平滑的转向和直线运动。代码结构清晰,模块化设计使得各个部分功能独立,便于维护和扩展。

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 11
11 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)