如何用轮毂电机FOC驱动板+控制板构建ROS1导航小车
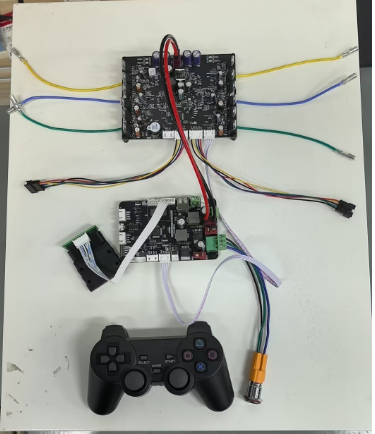
轮毂电机的优势是负载大、安静、省电,由于买我们家的FOC控制板的用户,做AVG小车与SLAM负载小车,但由于购买了不同配置的用户,使用中会遇到各种问题,这里把每种配置的使用教程都出个详细的文档与视频。这里是针对购买了FOC驱动板+控制板的用户需要构建ROS1导航小车的用户。收到配套用户如下图,一块驱动板,一块控制板,PS2手柄一套,开关,供电线、通信线这些,如何快速构建ROS1导航小车,也可以
前言
轮毂电机的优势是负载大、安静、省电,由于买我们家的FOC控制板的用户,做AGV小车与SLAM负载小车,但由于购买了不同配置的用户,使用中会遇到各种问题,这里把每种配置的使用教程都出个详细的文档与视频。这里是针对购买了FOC驱动板+控制板的用户需要构建ROS1导航小车的用户。
收到配套用户如下图,一块驱动板,一块控制板,PS2手柄一套,开关,供电线、通信线这些,如何快速构建ROS1导航小车,也可以参考配套视频快速构建ROS1 SLAM小车。
FOC驱动板+控制板快速构建ROS1导航小车
- 板子已经烧好程序,到后直接使用
这里只针对FOC驱动板与+控制板的用户,如果只单独购买FOC驱动板,可以参考单独FOC驱动板使用教程。
一、关于FOC驱动板+控制板这一套的优劣势(极力推荐方式)
优势
- 1、控制板集成了电源管理,与多种传感器,像IMU、手柄、航模、超声波,多路串口、5V 4A供电,15V 2.5A供电
- 2、控制板代码开源,注意是控制板代码开源,FOC驱动板只提供协议
- 3、控制板代码同时可以支持ROS1与ROS2两种系统,不用修改底层
- 4、做ROS车里程计精度更高,系统集成了电机速度与IMU融合后的里程计,建图与导航的精度更高
- 5、可以快速上手,相对于单独一块FOC驱动板的来说,这一套组合拿到后接上电机与电池,可以用手柄控制
不足
- 供电电压只支持24V,这里由于受到控制板DC-DC芯片的限制,不能使用36V的电池,FOC电机驱动板可以支持到36V
二、关于接线
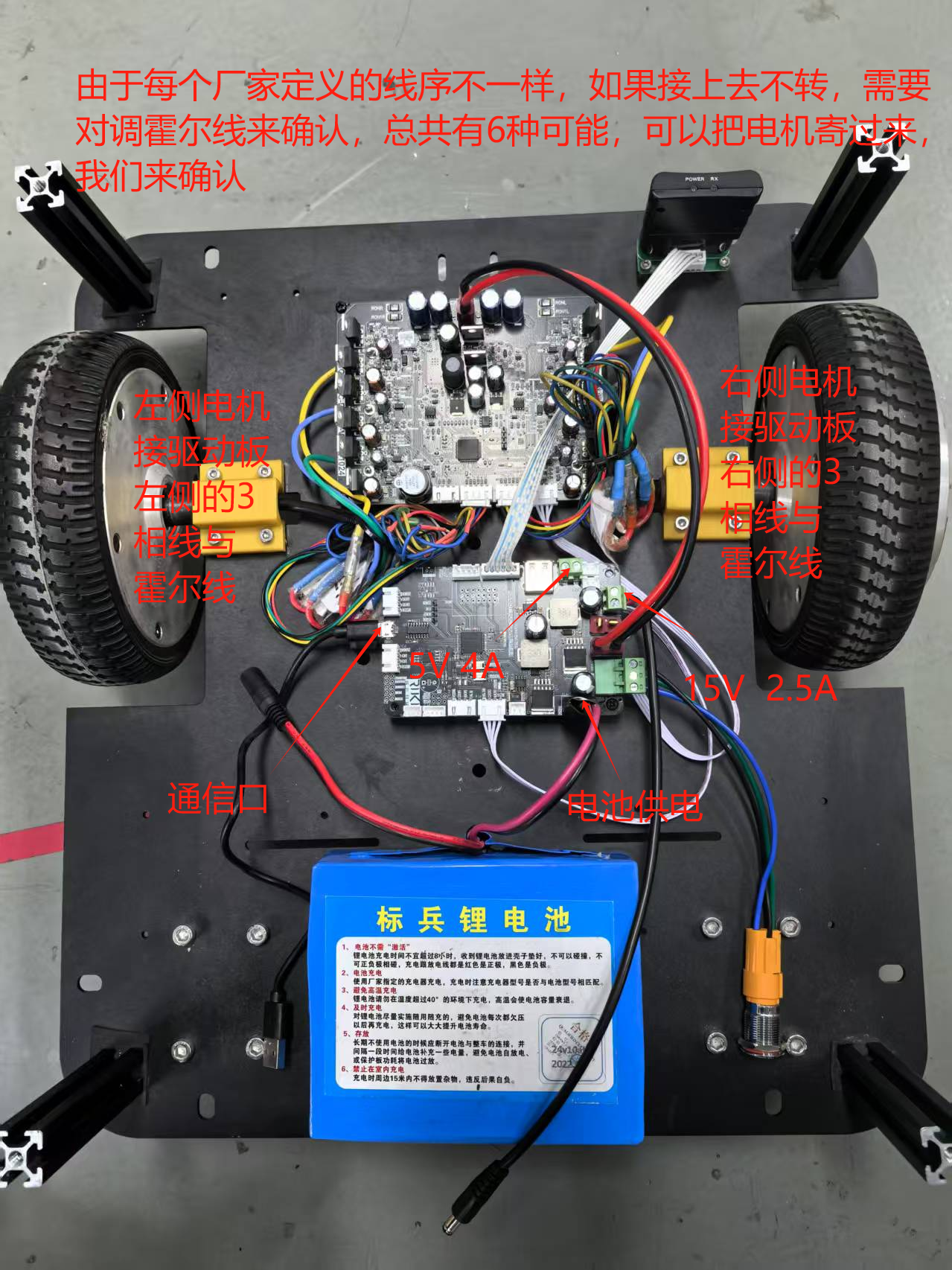
关于拿到上面配置的用户如何接线,请参考下图,如果是自己电机,霍尔线有可能需要对调,有6种可能,如果不对,电机要么不转,要么失速,方便的话可以把电机寄给我们,我们这边确认后,在发给你们,到时就可以上手直接用。
三、如何快速让电机动起来(具体可看视频)
用户接好线后,可以按开关按钮直接上电,当喇叭滴的一声,说明系统上电启动正常,这时我们拿好手柄(或者航模遥控器),把手柄(航模摇控器)开关打开,两个灯同时亮说明配对成功,如果只亮一个,可以按“start”或者"Mode"按键,随意按,直到匹配成功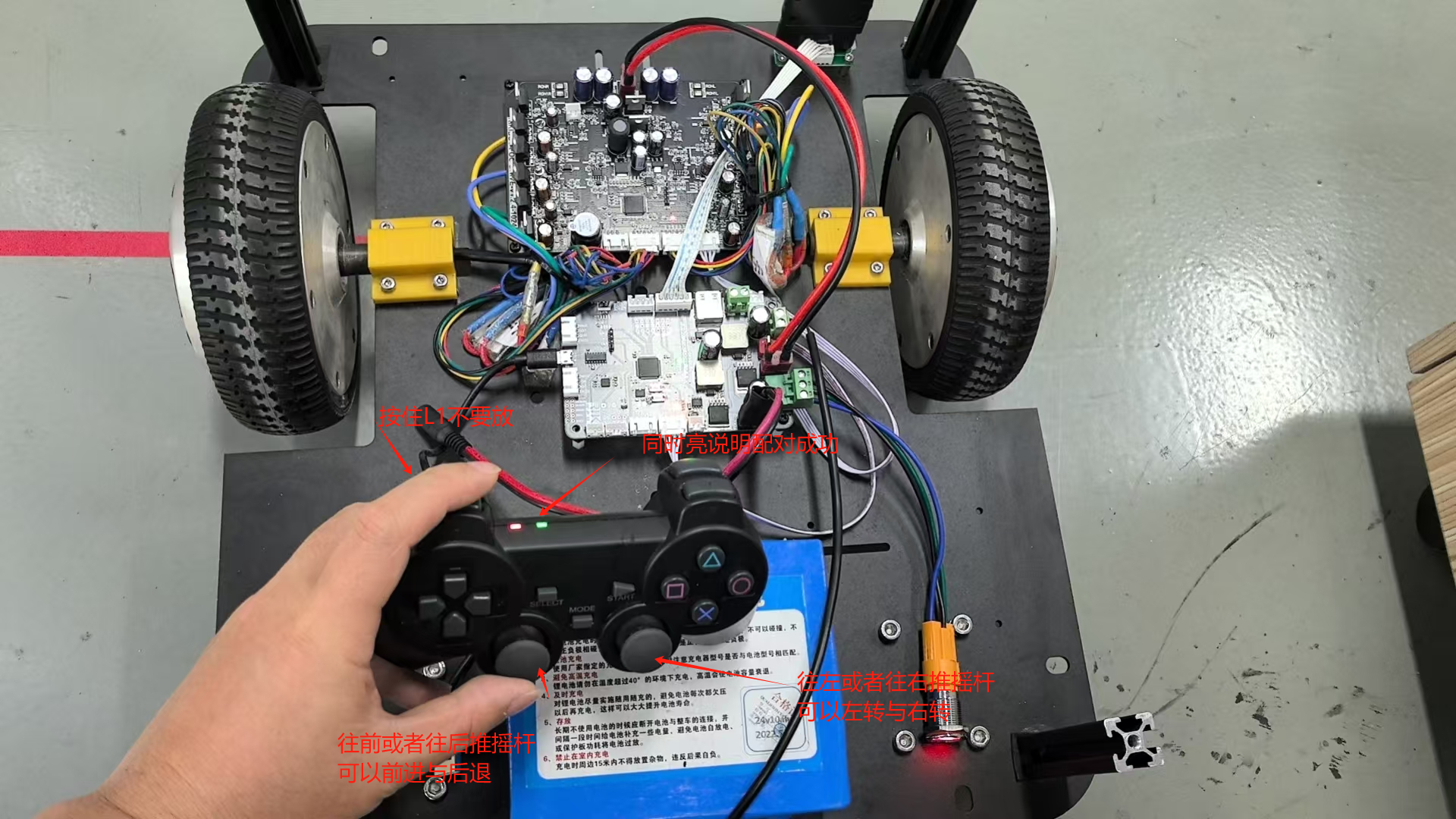
四、如何快速构建ROS1系统
如果要做ROS1导航小车,需要用户准备好主控与雷达,下面这用jetson nx主控与rplidar A1雷达为示例做为演示
1、 准备好主控与安装好ROS1系统
这里我用的是NX,ubuntu20.04,如何安装ROS系统这里就不在赘述,网上大把的教程,这里不在赘述,然后自己接好雷达,源码包里默认是rplidar 雷达
2、下载代码
直接下载代码,到你需要构建的系统里面:
git clone https://gitee.com/rikibot/robot_ws.git
下载好代码后,进到robot_ws/src/install 目录,看README.md文件里面有详细的教程
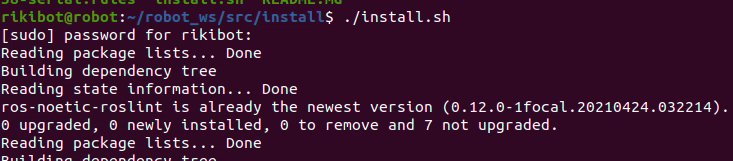
3、 进入到install目录安装文件依赖包,执行
./install.sh
里面会安装必要的依赖文件与串口规则文件
4.进入到robot_ws这级目录,编译代码
catkin_make -j1
5.编译完成后把工作空间写入环境变量, 重启系统
echo “source ~/robot_ws/devel/setup.bash” >> ~/.bashrc

6.键盘控制车辆,分别打开两个终端,启动下面两条命令
roslaunch rikibot bringup.launch
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
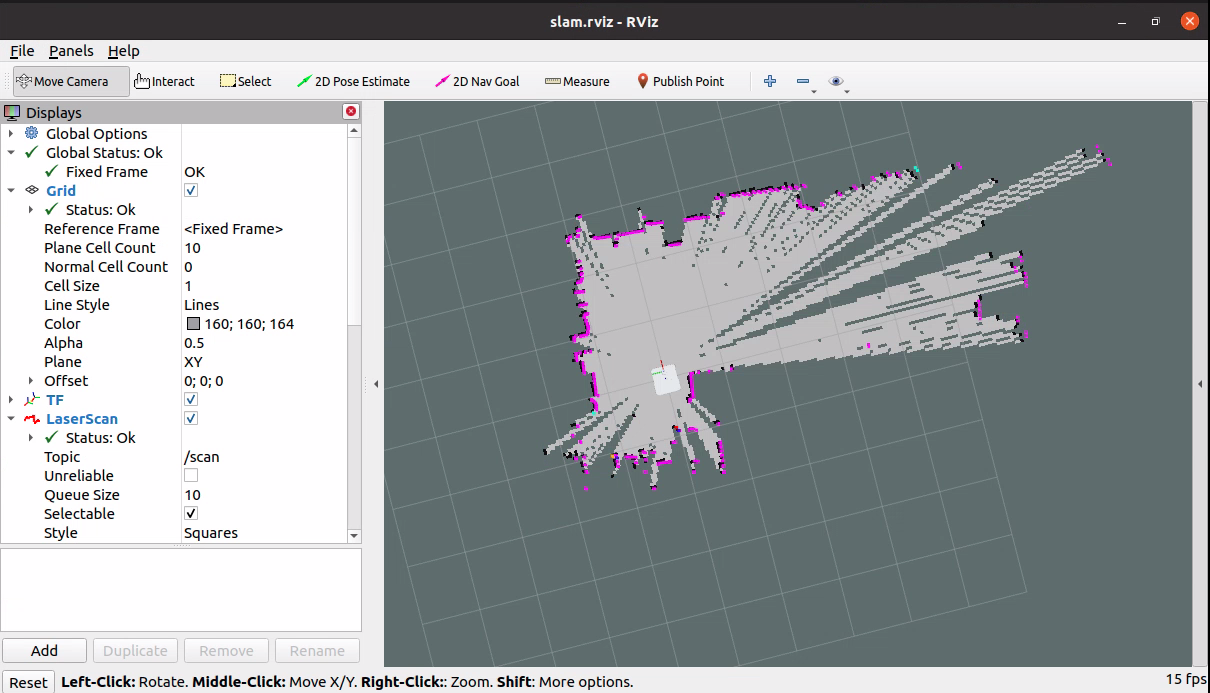
7.建图,分别启动下面两条命令
roslaunch rikibot bringup.launch

roslaunch rikibot lidar_slam.launch
打开rviz, 其中slam.rivz文件在rikibot包下面的rviz目录里面打开即可
rviz
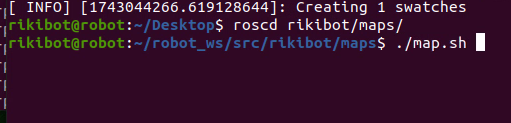
8.保存地图
控制车走一圈后,地图的轮廓与实现空间的轮廓差不多后,可以保存地图
roscd rikibot/maps
./map.sh
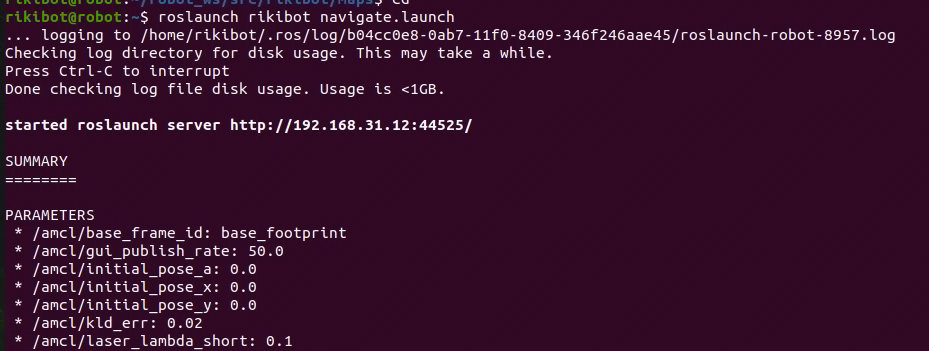
9. 导航
roslaunch rikibot bringup.launch
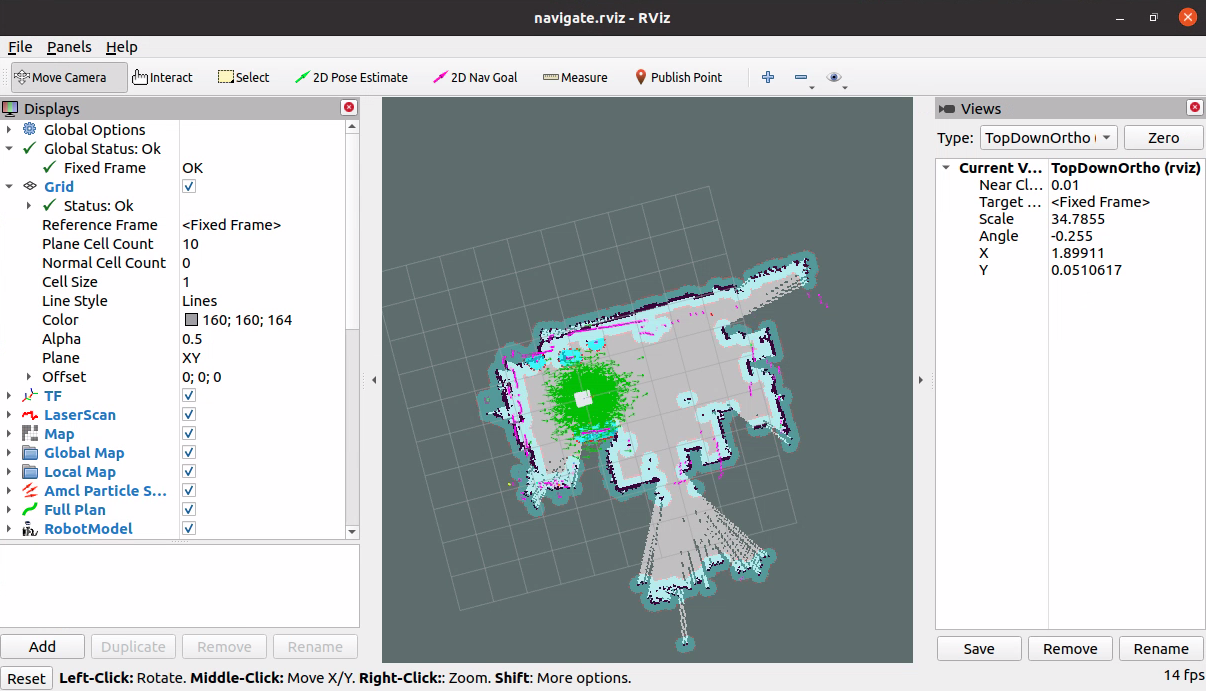
roslaunch rikibot navigate.launch
打开rviz,其中navigate.rivz文件在rikibot包下面的rviz目录里面打开即可
rviz

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 7
7 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)