1. 树莓派上配置机器人环境(具身智能机器人套件)
从零开始树莓派上配置机器人环境。
·
1. 安装树莓派系统(Arm架构)
Raspberry Pi 5搭载了64位的四核Arm Cortex-A76处理器,因此属于ARM64架构,参考文章树莓派4、5版本对比.
系统镜像下载地址(windows/Mac/Ubuntu),安装Pi5.
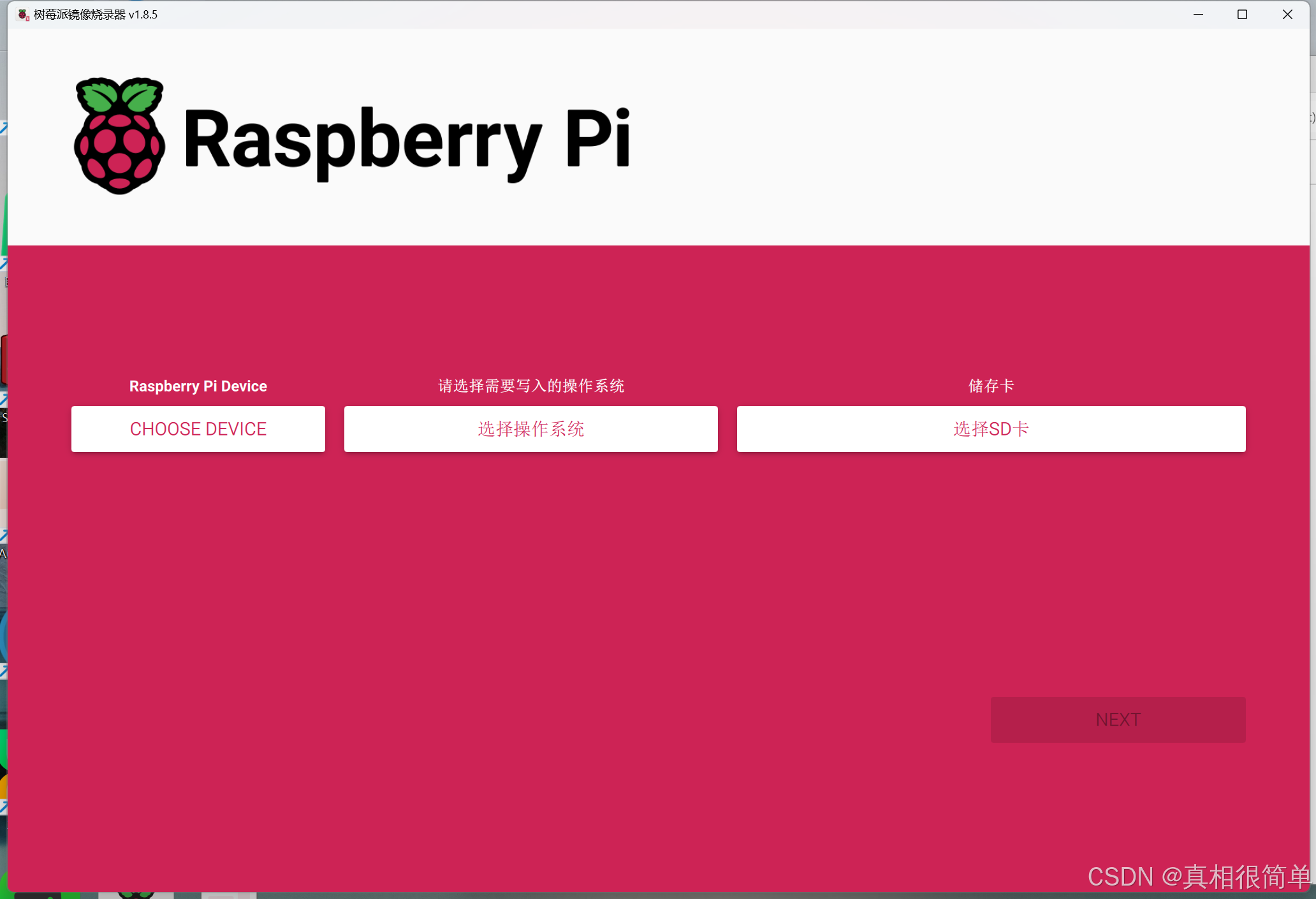
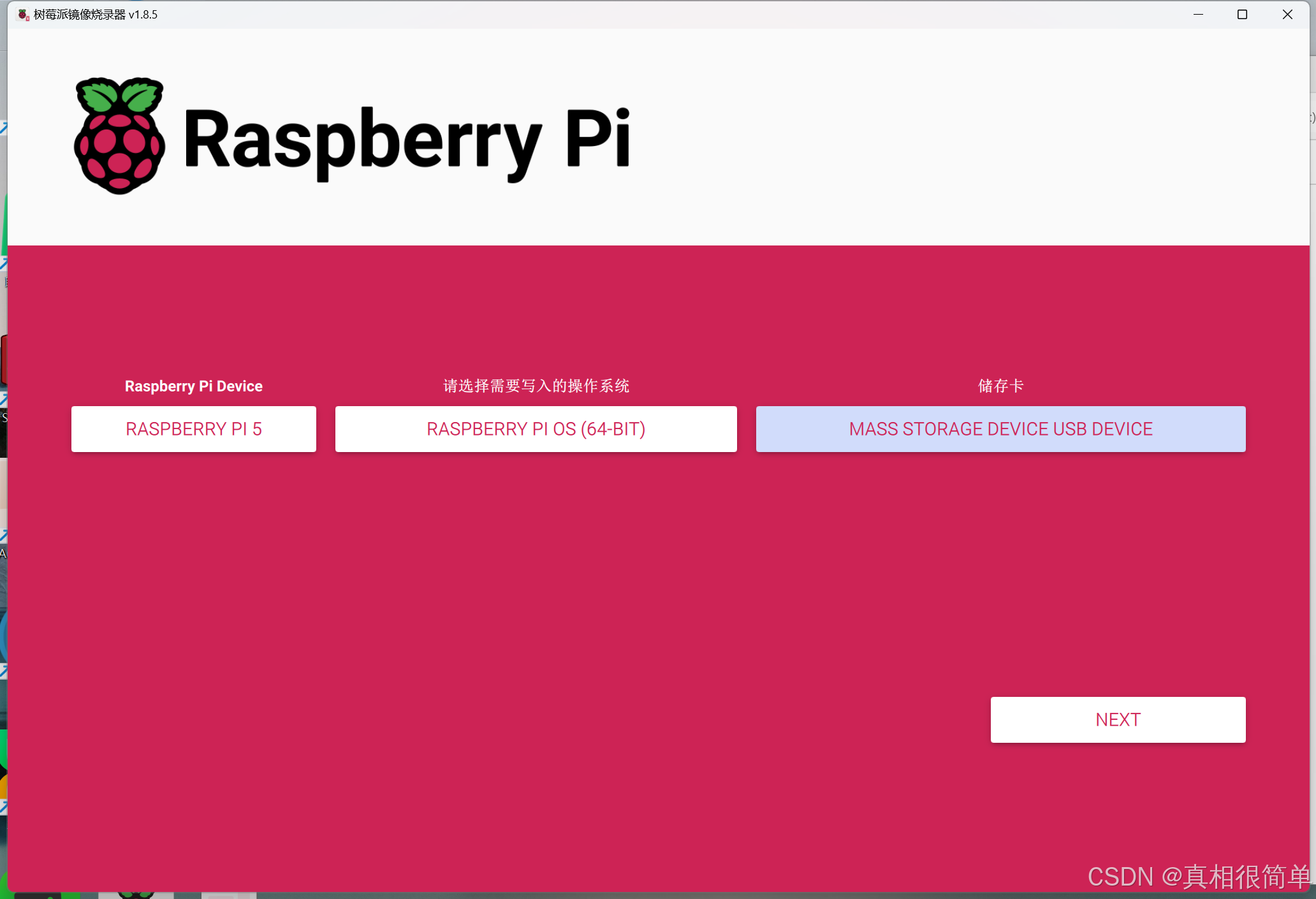
2. 环境配置
2.1 启用 SSH(登录Pi系统)
- 烧录程序之前
- 配置中选中启用SSH的复选框
- 点击确认(suoxd:123)
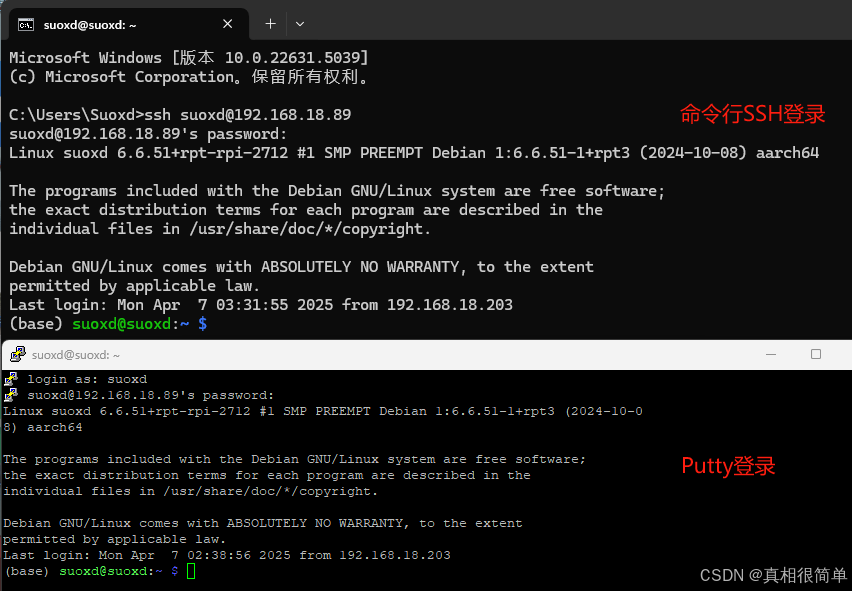
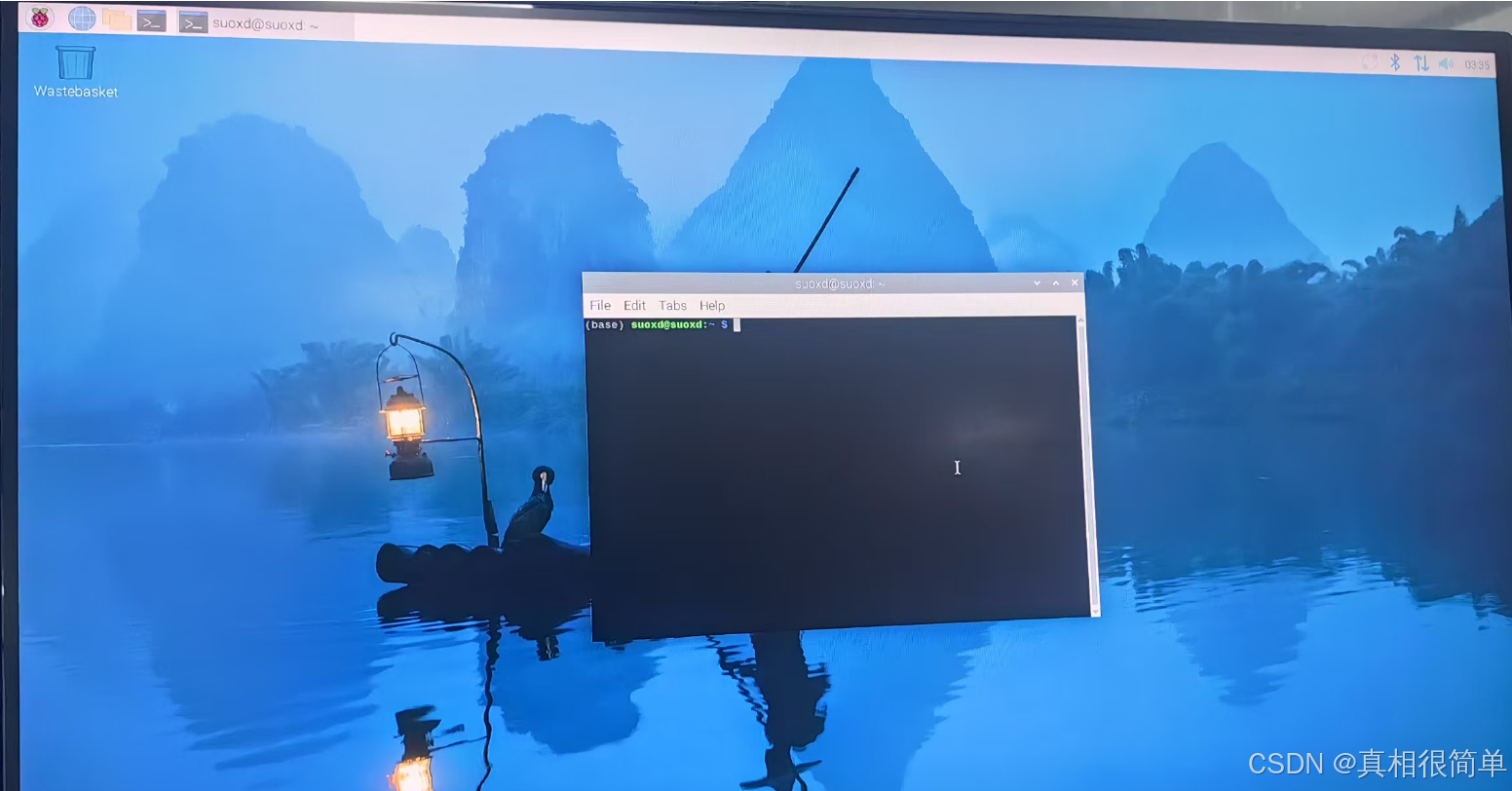
- 系统烧录后登录,常见三种方案,登录效果如下图
4.1 方案一:HDMI口直接连接显示器,作为开发主机使用(窗口界面显示)
4.2 方案二:开发主机通过命令行使用ssh登录:ssh username@IP_address
4.3 方案三:开发主机安装ssh访问工具使用(例如Putty) - 配置好树莓派系统的镜像文件Raspberry-lerobot-128G下载地址(SD卡不小于128G)
5.1 新的SD卡直接烧录就好
5.2 已经烧录树莓派系统的SD卡,需要先合并分区,操作步骤参考树莓派SD卡重新烧录镜像
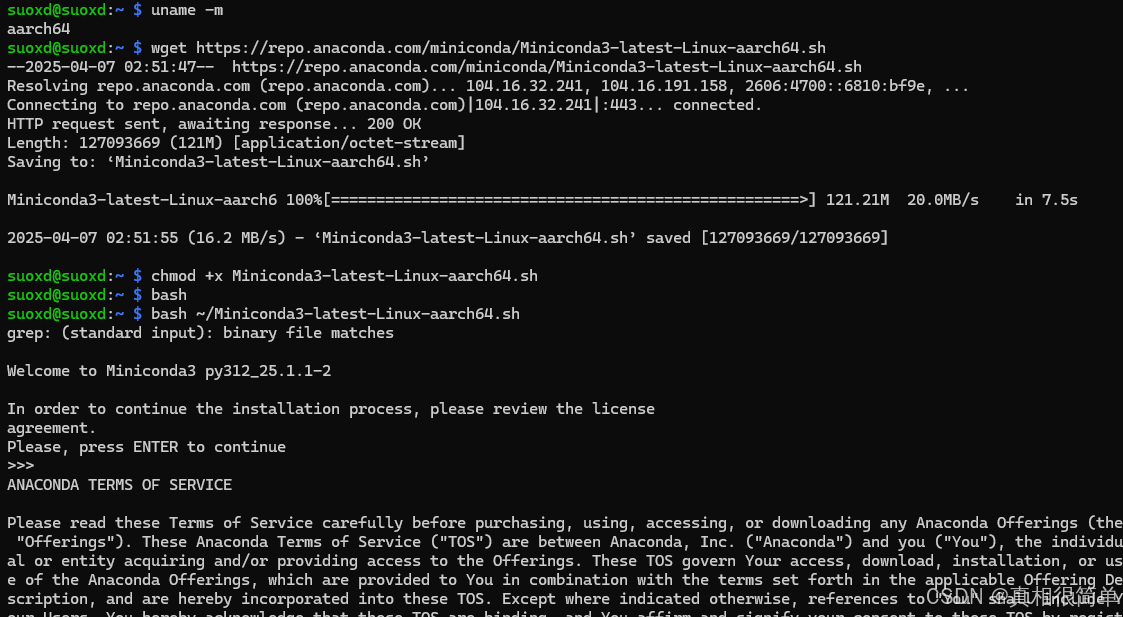
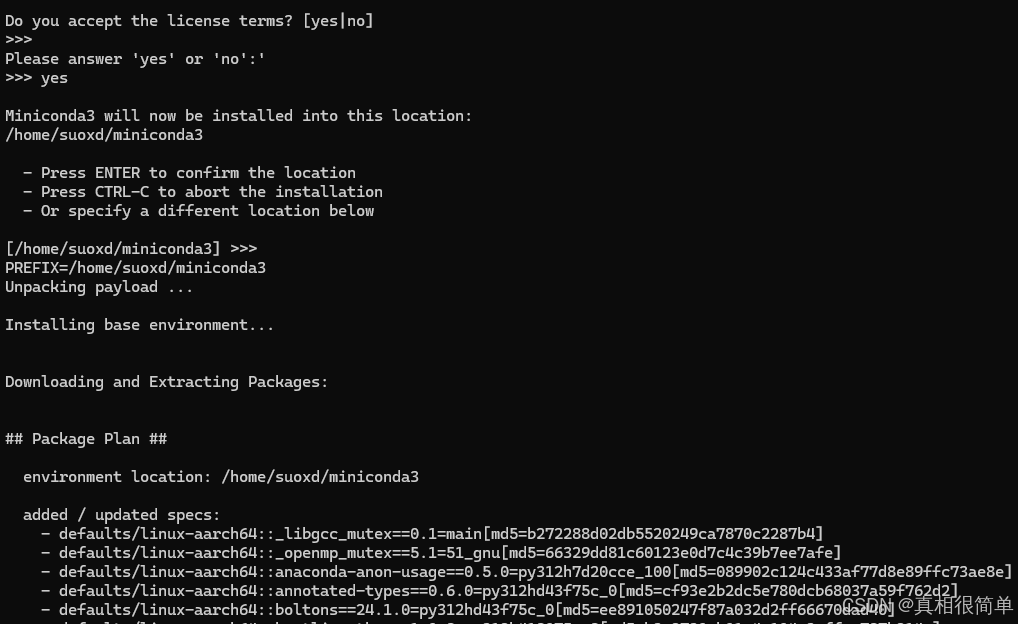
2.2 安装 Miniconda (Raspberry Pi 5使用的是64位ARM架构(arm64))
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-aarch64.sh
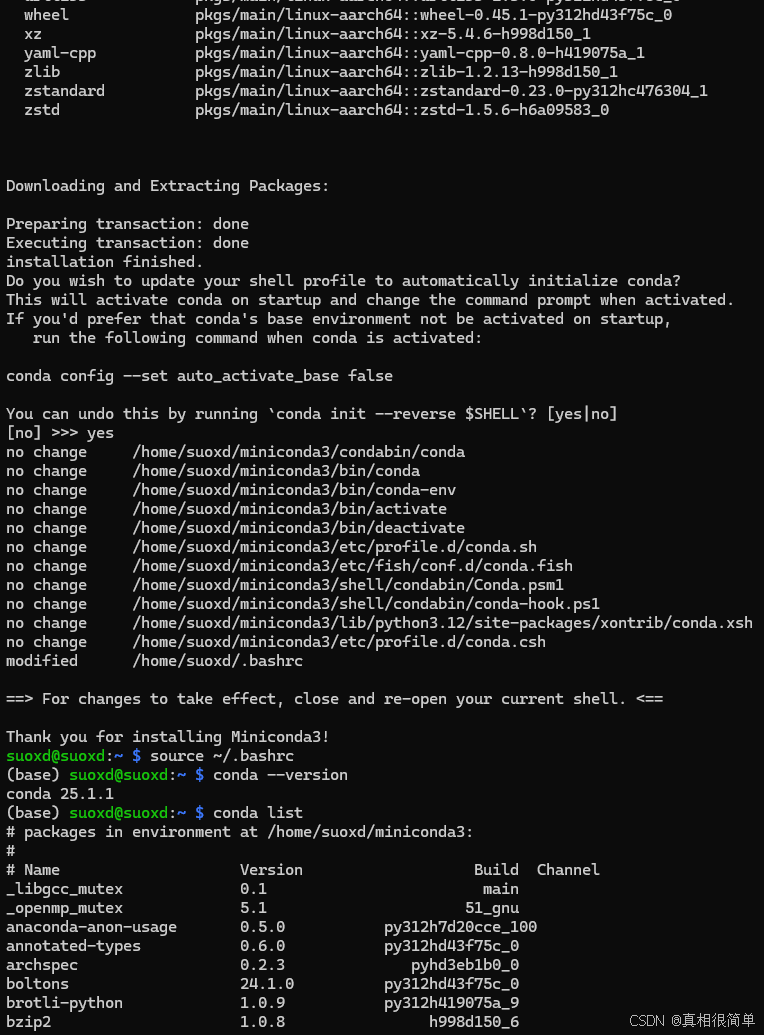
# 输入几个 yes (默认安装路径、是否默认启动等)
bash ~/Miniconda3-latest-Linux-aarch64.sh
source ~/.bashrc
conda list
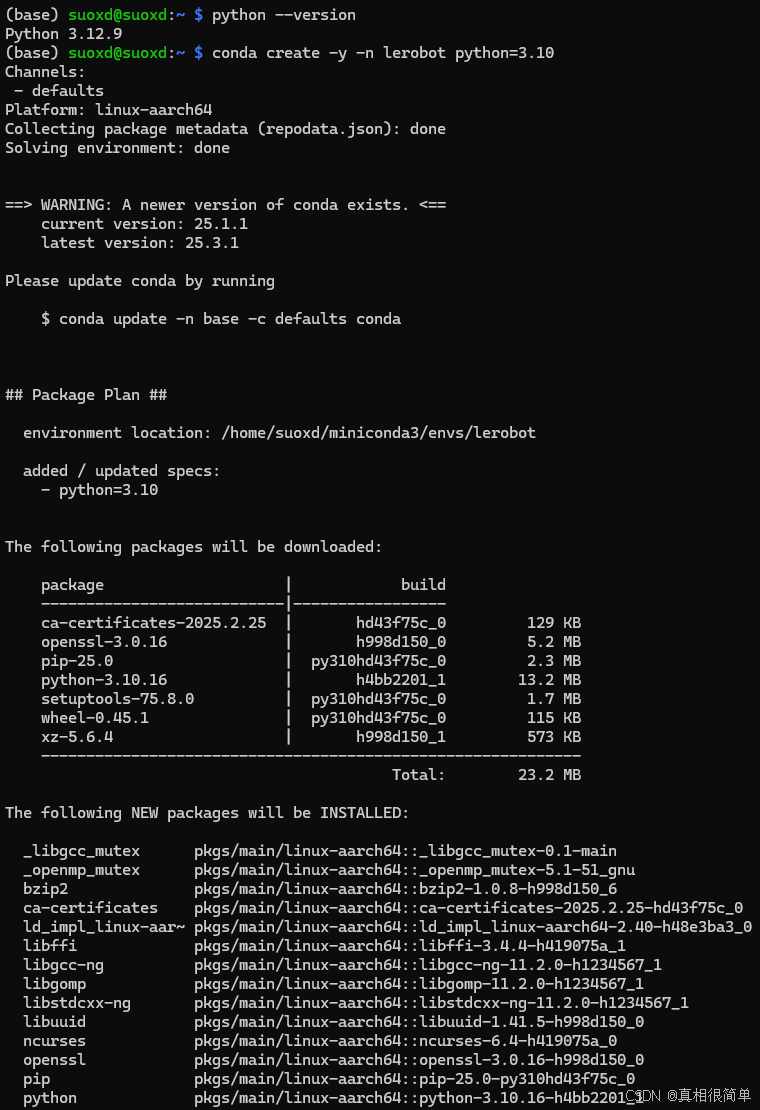
2.3 配置LeRobot
# 创建激活全新 conda 环境
conda create -y -n lerobot python=3.10
conda activate lerobot
# 下载安装Lerobot
git clone https://github.com/huggingface/lerobot.git ~/lerobot
cd ~/lerobot
# 使用feetech电机的依赖项安装LeRobot
pip install -e ".[feetech]"

2.4 github 免科学上网
- 源码直接从百度网盘下载lerobot-main.zip
- 拷贝到树莓派系统(scp命令或者使用WinScp软件)
- 解压:unzip lerobot-main
- 重命名:mv mv lerobot-main lerobot
配置环境
3. 镜像备份
3.1 软件安装
官网:https://win32diskimager.org/
网盘下载:win32diskimager-1.0.0-install.exe
3.2 制作镜像
- 拔出SD卡,使用读卡器,插入电脑USB口
- 选择路径后命名镜像文件:xxx.img
- 读取:win32diskimager软件自动读取SD卡系统写入img镜像文件
具身开源套件部分课程如下,欢迎联系合作采购(全套开源)

火山引擎开发者社区是火山引擎打造的AI技术生态平台,聚焦Agent与大模型开发,提供豆包系列模型(图像/视频/视觉)、智能分析与会话工具,并配套评测集、动手实验室及行业案例库。社区通过技术沙龙、挑战赛等活动促进开发者成长,新用户可领50万Tokens权益,助力构建智能应用。
更多推荐
 9
9 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)